|













| |
Servo test results
Presented below are the test-results of the servo's tested so
far, good and bad, old and new. Description of test method and how the
results are presented can be found here.
|
Manufacturer specifications |
My test results (if not otherwise stated, at 5.0V) |
|
Servo designation |
Weight [g] |
Size
(LxHxW) [mm] |
Speed [s/60°] |
Torque
[kgcm] |
Gearbox |
Start-stop Speed [s/60°] |
Speed
[s/60°] (No load) |
Speed
[s/60°] (@2kgcm) |
Accuracy
[°] (No load) |
Accuracy
[°] (@2kgcm) |
Complete
Results |
Comments |
|
=== FUTABA === |
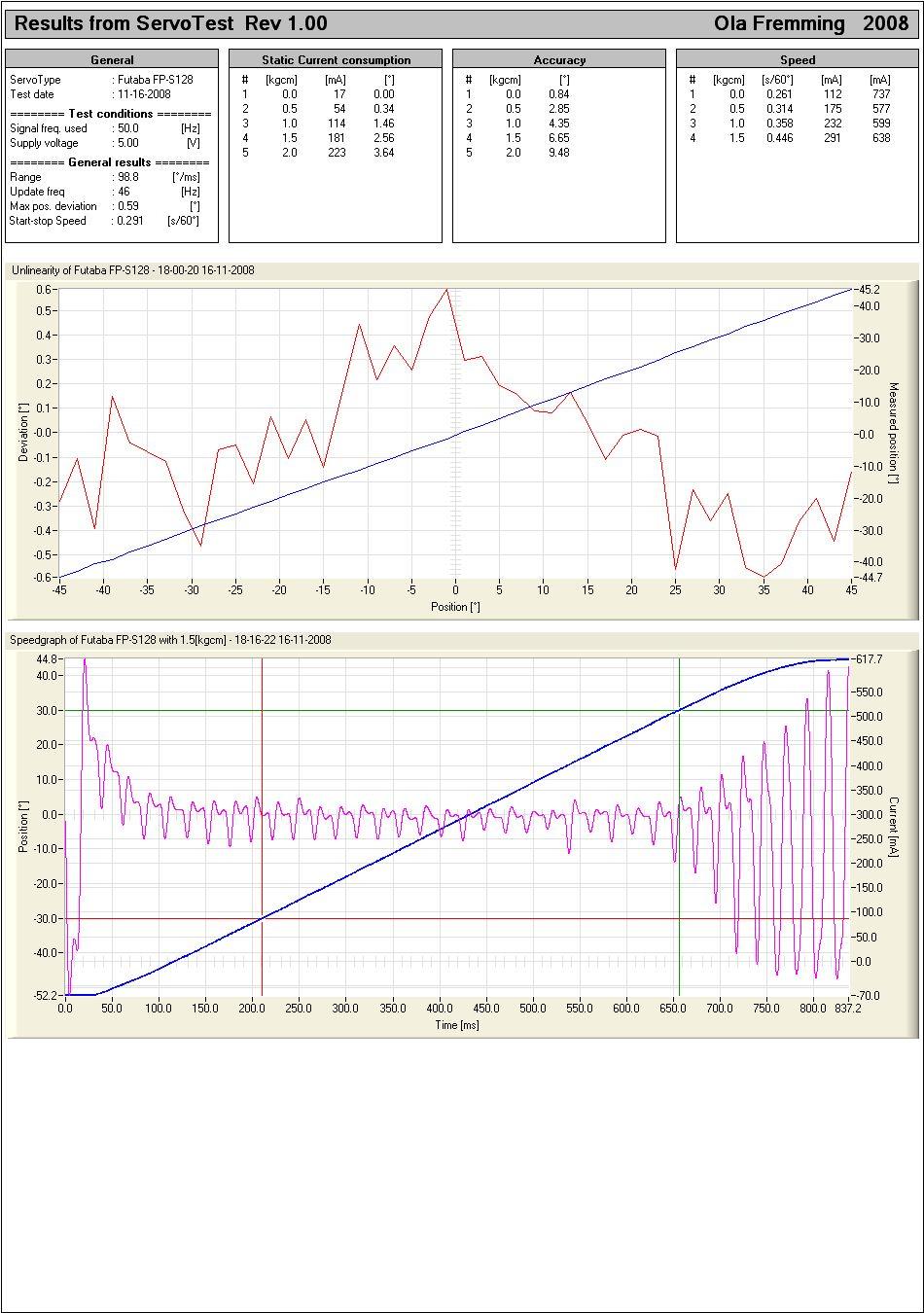
| Futaba
FP-S128 |
53 |
40.5x40.5x20 |
0.24 |
3.5 |
Plastic |
0.29 |
0.26 |
0.45* |
0.84 |
9.5 |
FP-S128 |
*Tested
at 1.5kgcm, failed test at 2kgcm |
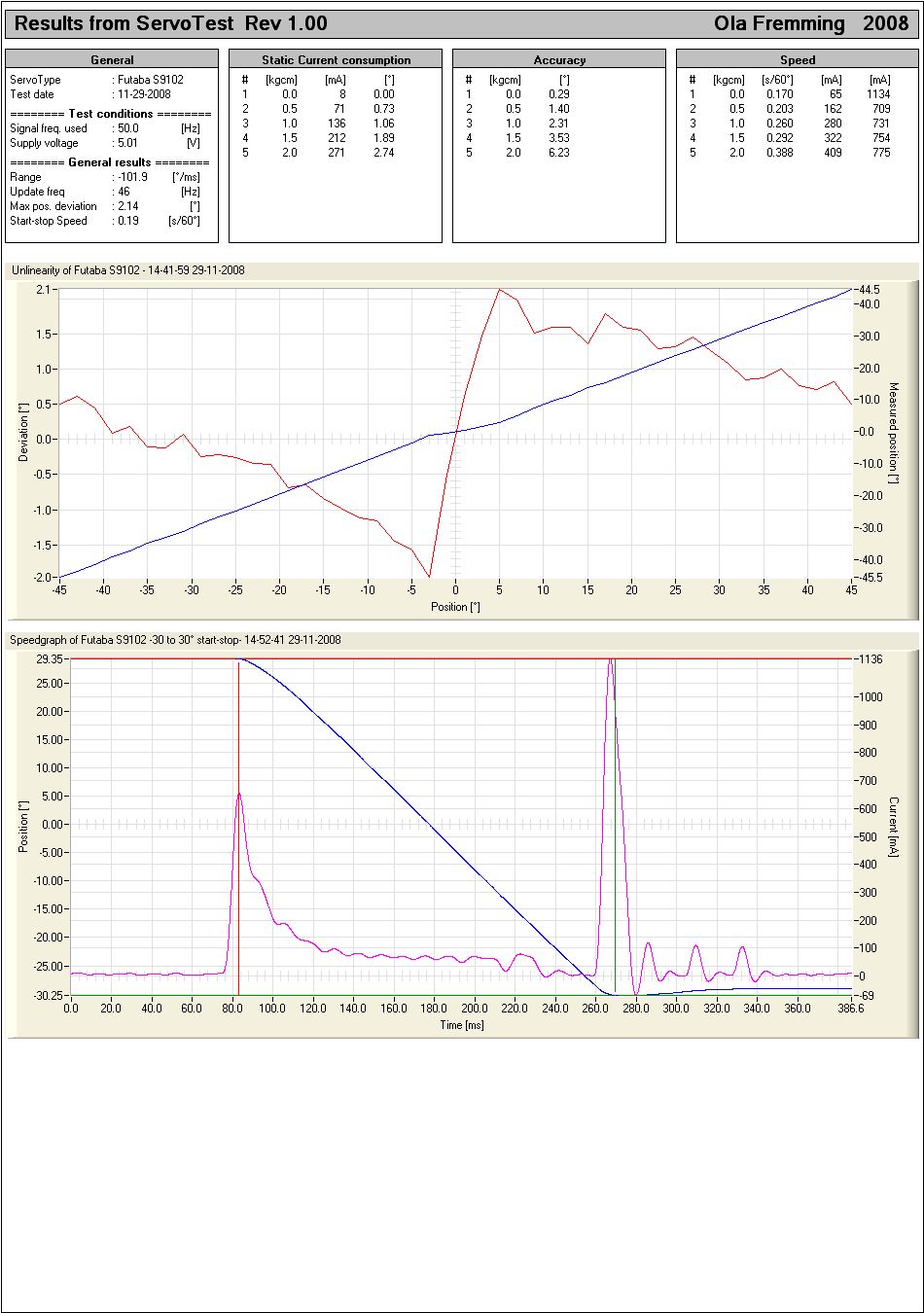
| Futaba
S9102 |
45 |
41x25x23 |
0.16 |
2.8 |
Plastic |
0.19 |
0.17 |
0.39 |
0.29 |
6.2 |
S9102 |
Not
new, overshoots when stopping |
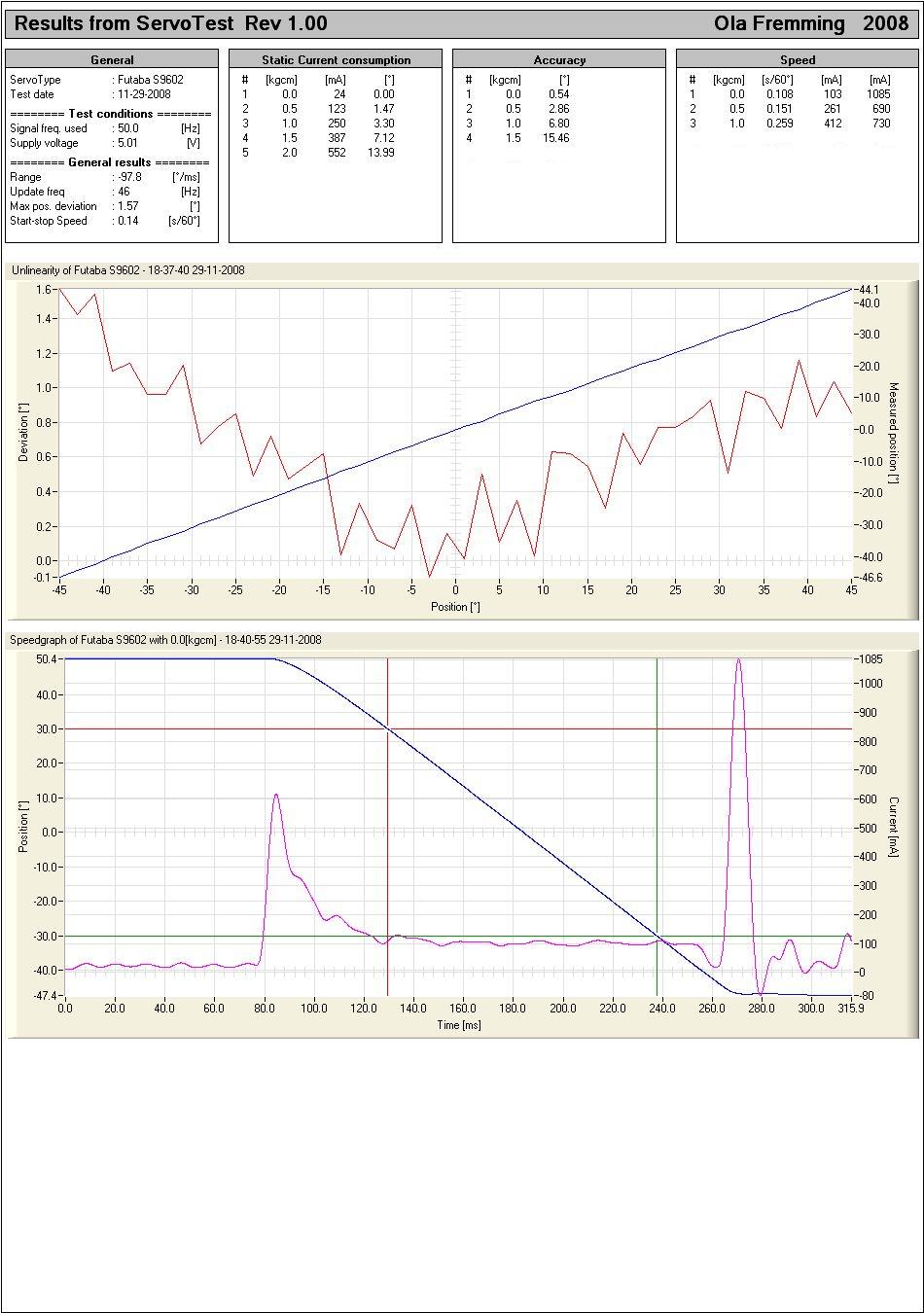
| Futaba
S9602 |
31 |
36x30.7x15 |
0.09 |
2.7 |
Metal |
0.14 |
0.11 |
0.26* |
0.54 |
15.5** |
S9602 |
*Tested
at 1.0kgcm **Tested at 1.5kgcm |
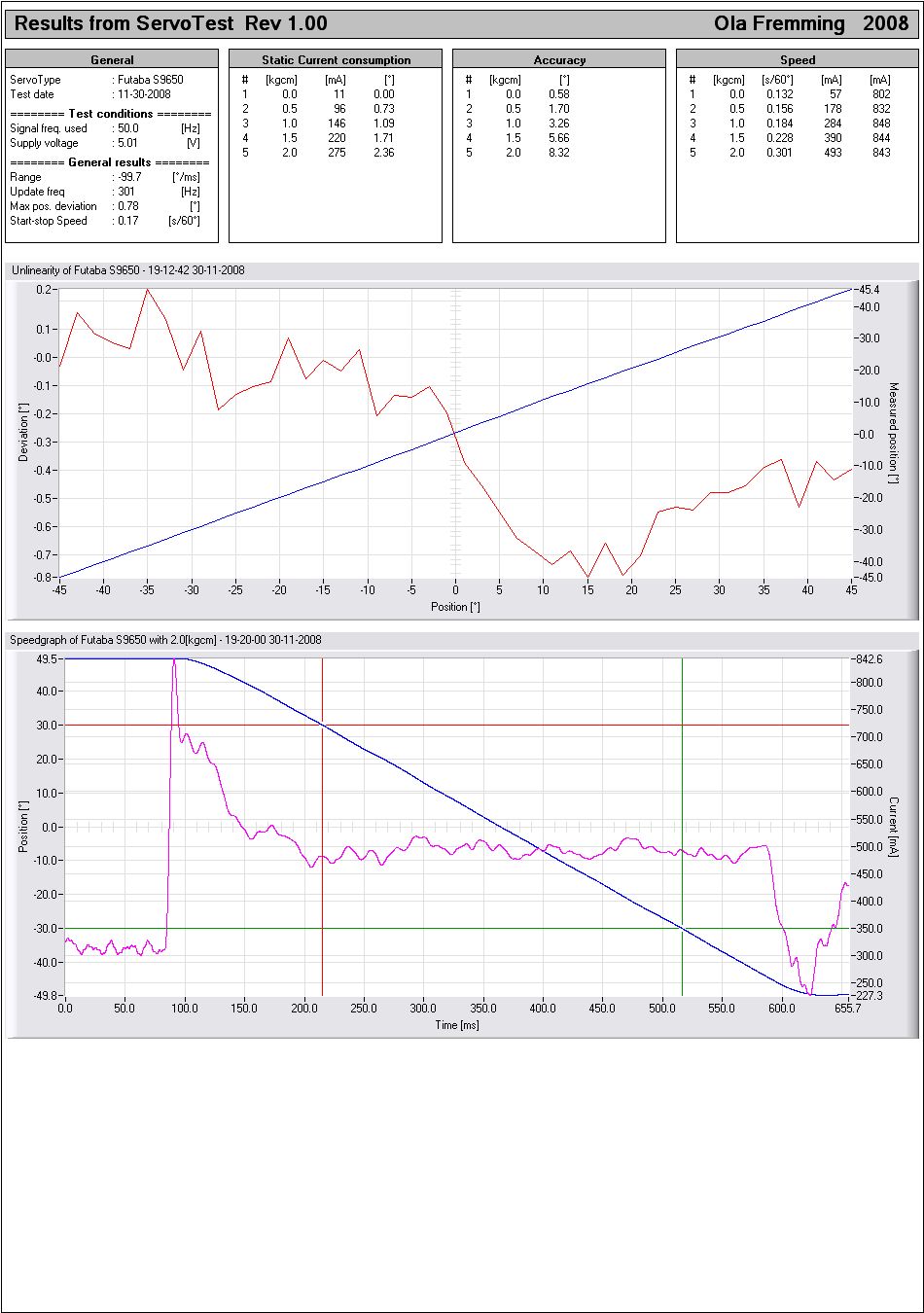
| Futaba
S9650 |
26 |
35.5x28.5x15 |
0.11 |
4.5 |
Metal |
0.17 |
0.13 |
0.30 |
0.58 |
8.3 |
S9650 |
|
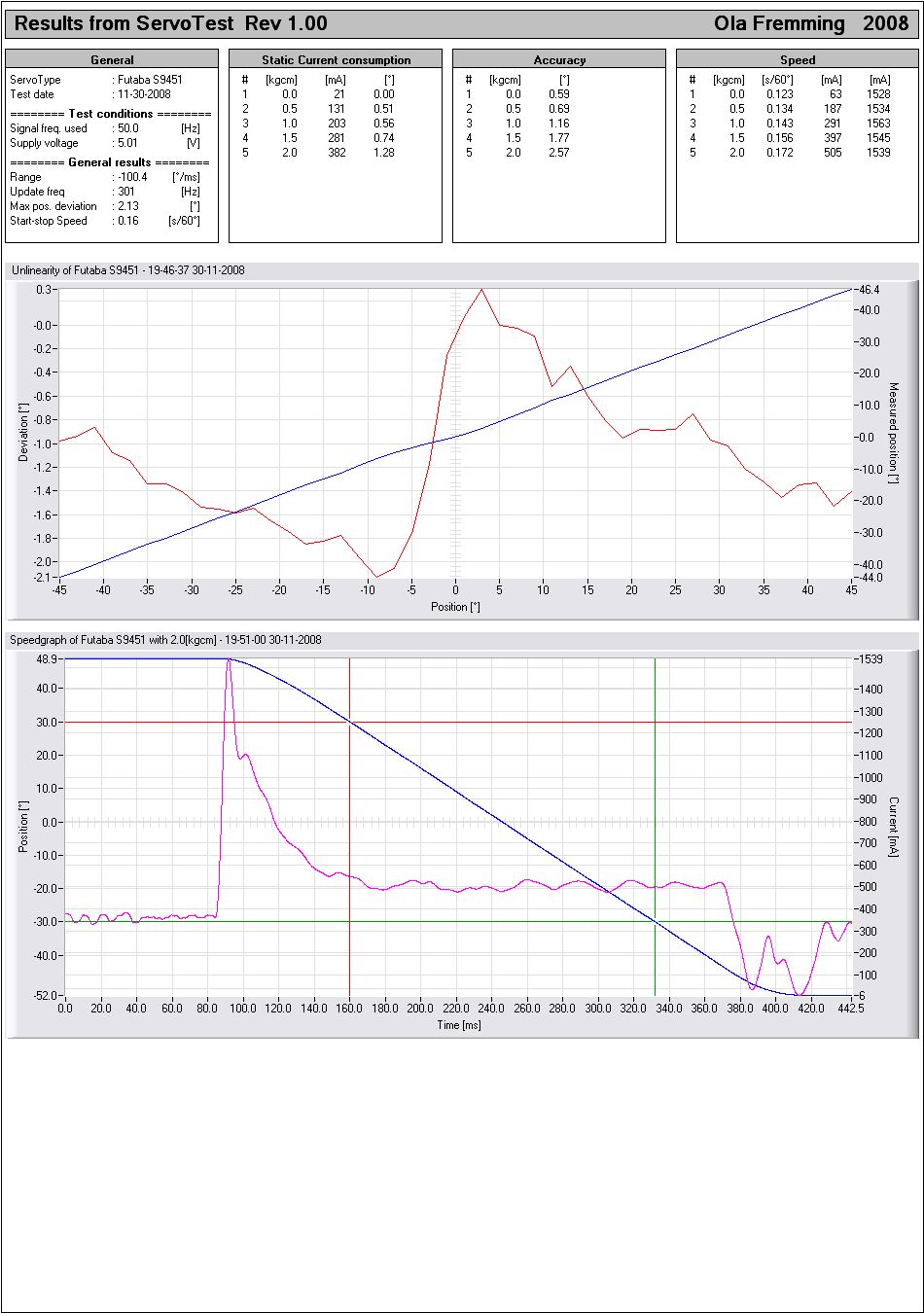
| Futaba
S9451 |
56 |
40x36.5x20 |
0.10 |
8.7 |
Metal |
0.16 |
0.12 |
0.17 |
0.59 |
2.6 |
S9451 |
|
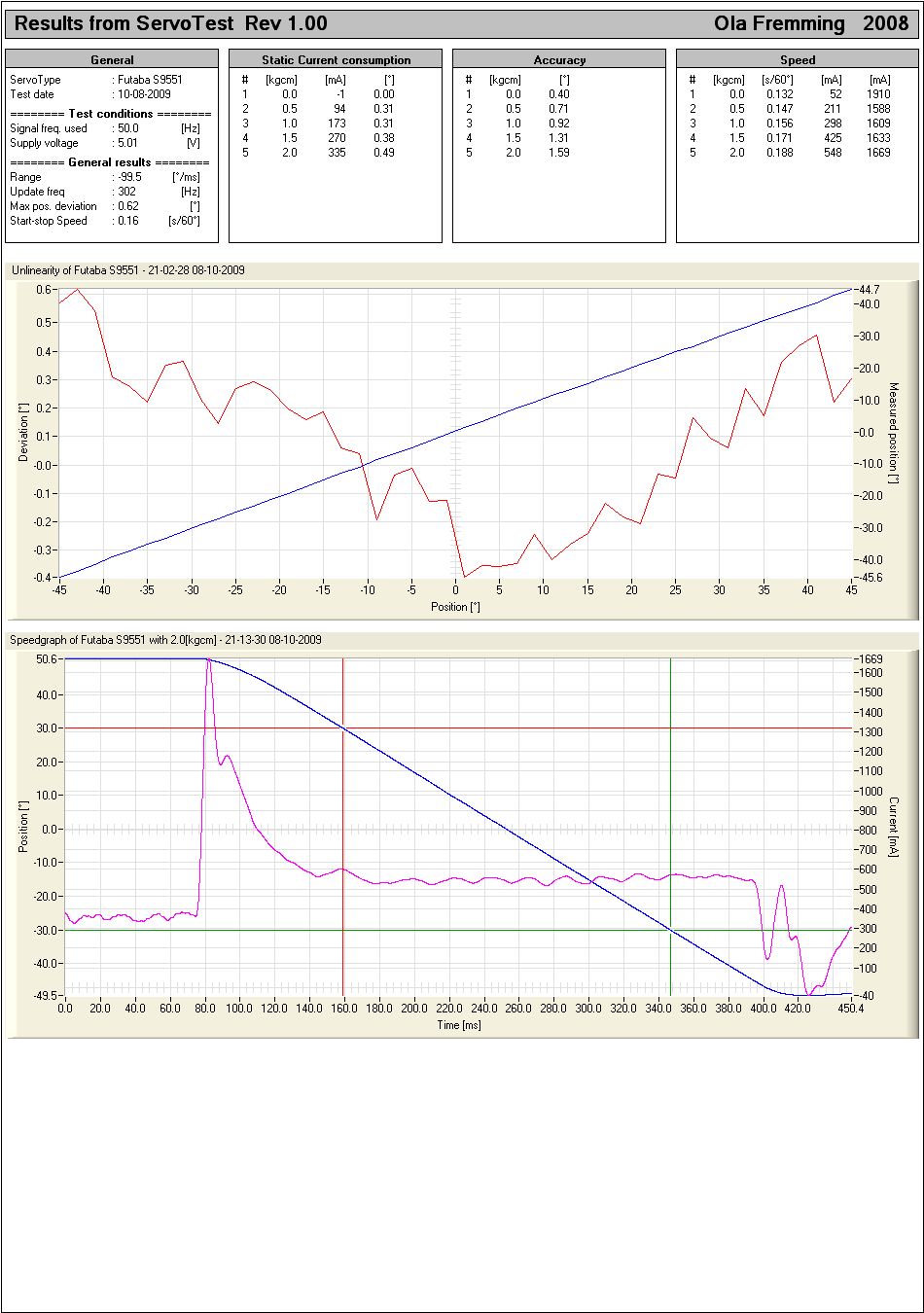
| Futaba
S9551 |
45 |
41x25x20 |
0.14 |
4.8 |
Metal |
0.16 |
0.13 |
0.19 |
0.4 |
1.6 |
S9551 |
VERY
precise |
| Futaba
BLS551 |
44 |
40.5x25.4x20 |
0.13 |
7.3 |
Metal |
0.13 |
0.12 |
0.17 |
0.97 |
2.14 |
BLS551 |
|
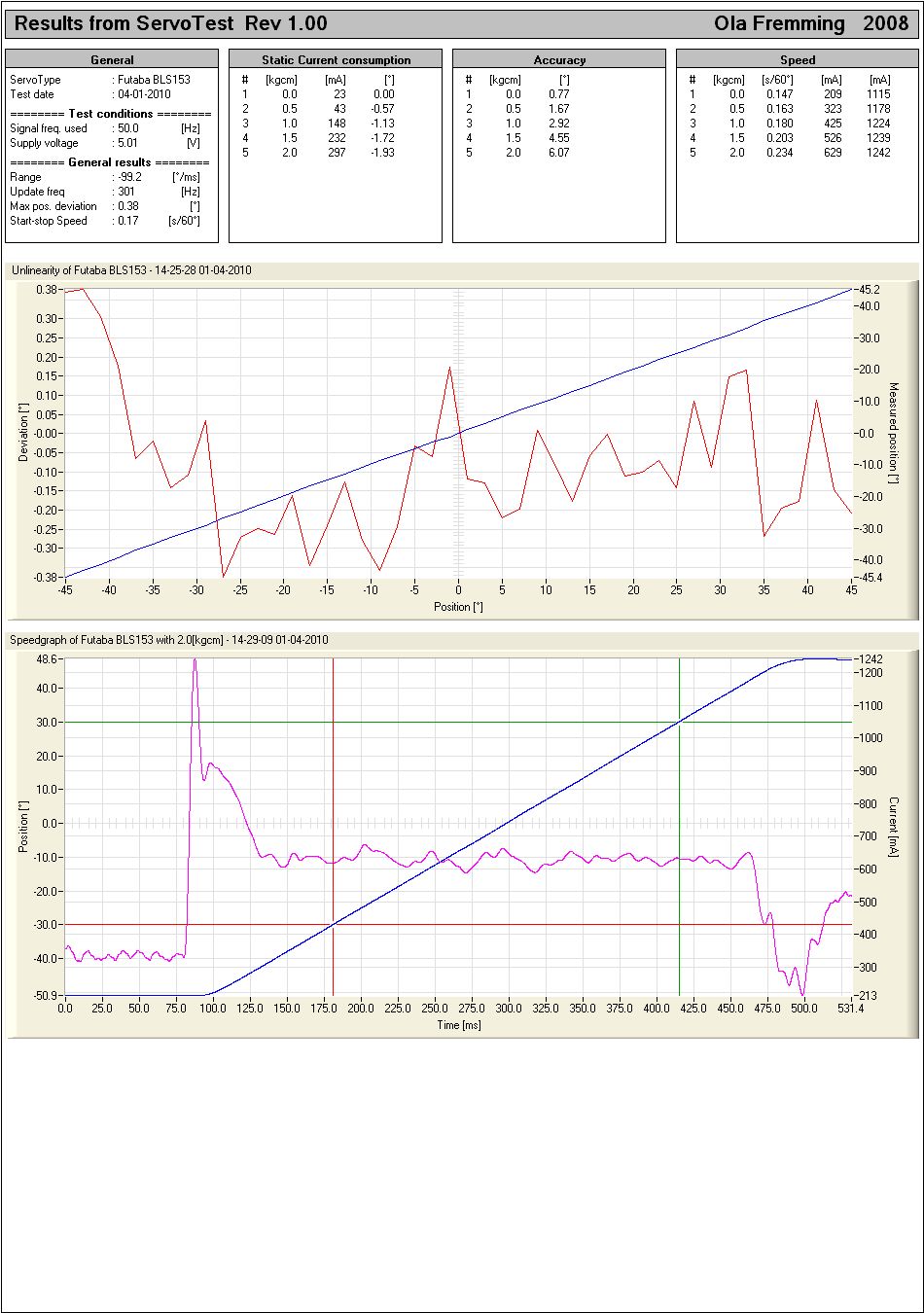
| Futaba
BLS153 |
26 |
35.5x28.6x15 |
0.15 |
5.5 |
Plastic
? |
0.17 |
0.15 |
0.23 |
0.77 |
6.1 |
BLS153 |
|
|
Futaba 3173SVi |
20 |
30x10.8x29.1 |
0.16 |
4.3 |
Metal |
|
0.16 |
0.32 |
1.16 |
3.1* |
|
*At 1.5kgcm, tested at 8V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=== HITEC === |
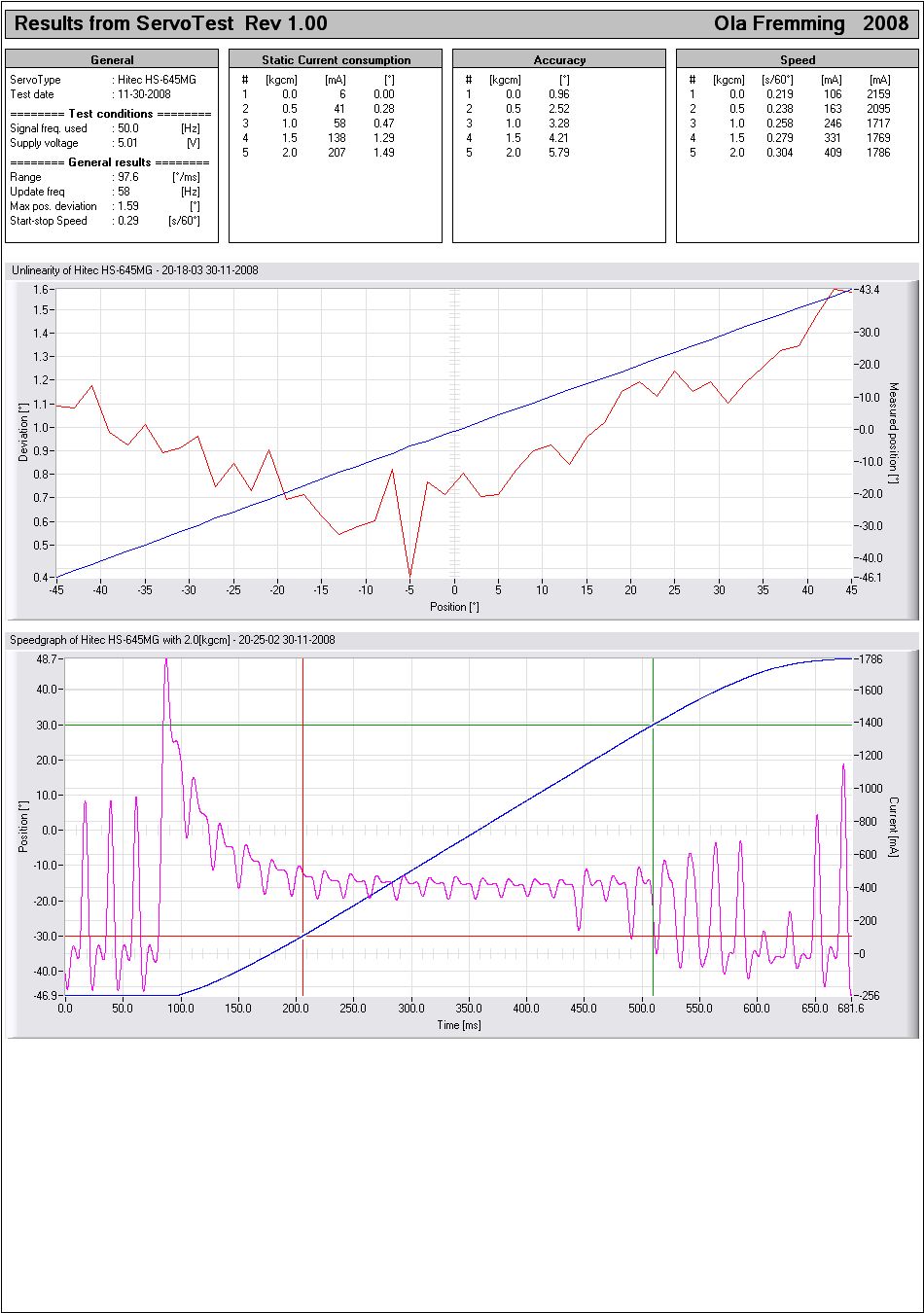
| Hitec
HS645MG |
60 |
40.5x38x20 |
0.2 |
9.6 |
Metal |
0.29 |
0.22 |
0.30 |
0.96 |
5.8 |
HS645MG |
|
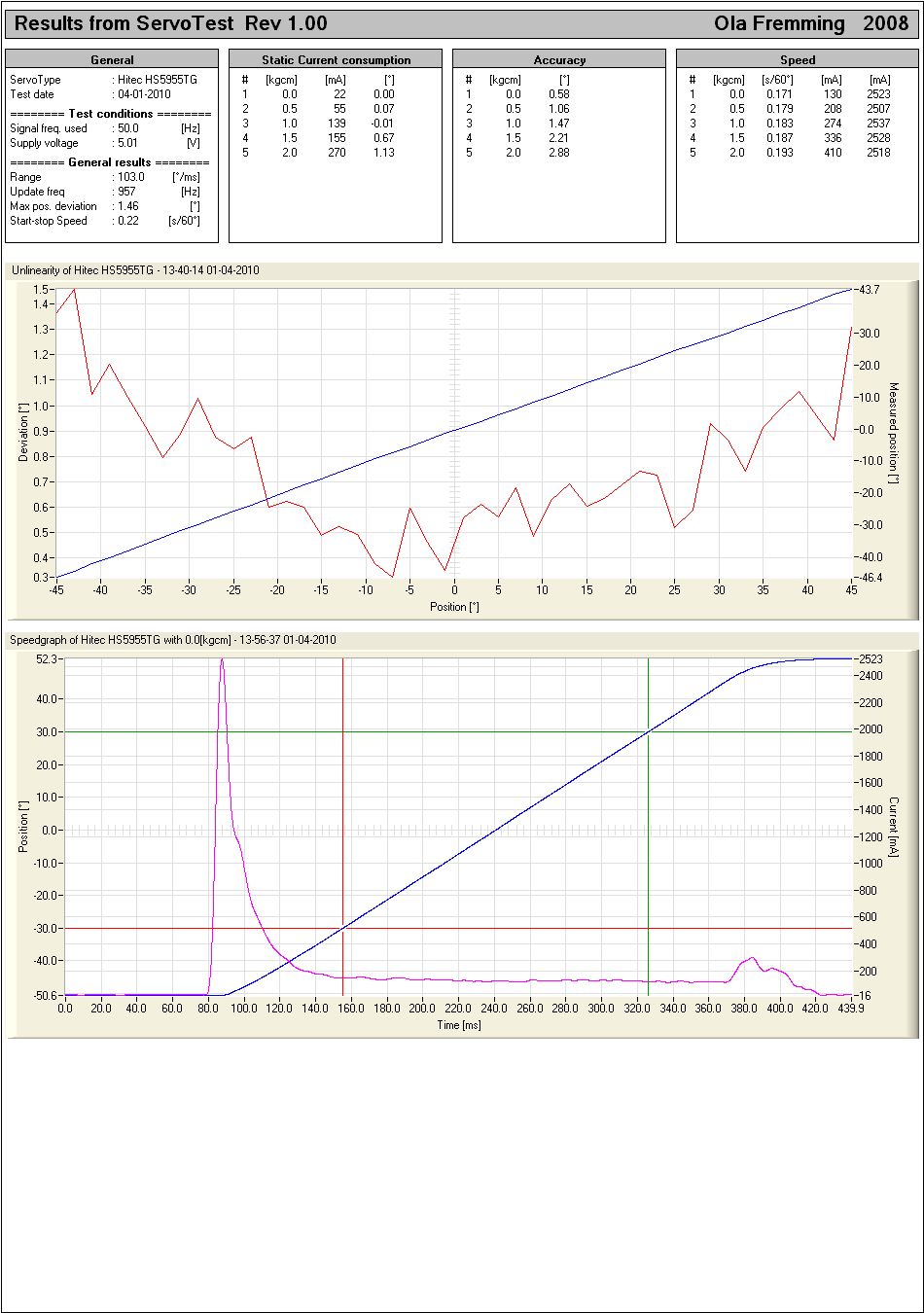
| Hitec
HS5955TG |
62 |
40x37x20 |
0.19 |
18 |
Metal |
0.22 |
0.17 |
0.19 |
0.58 |
2.9 |
HS5955TG |
|
|
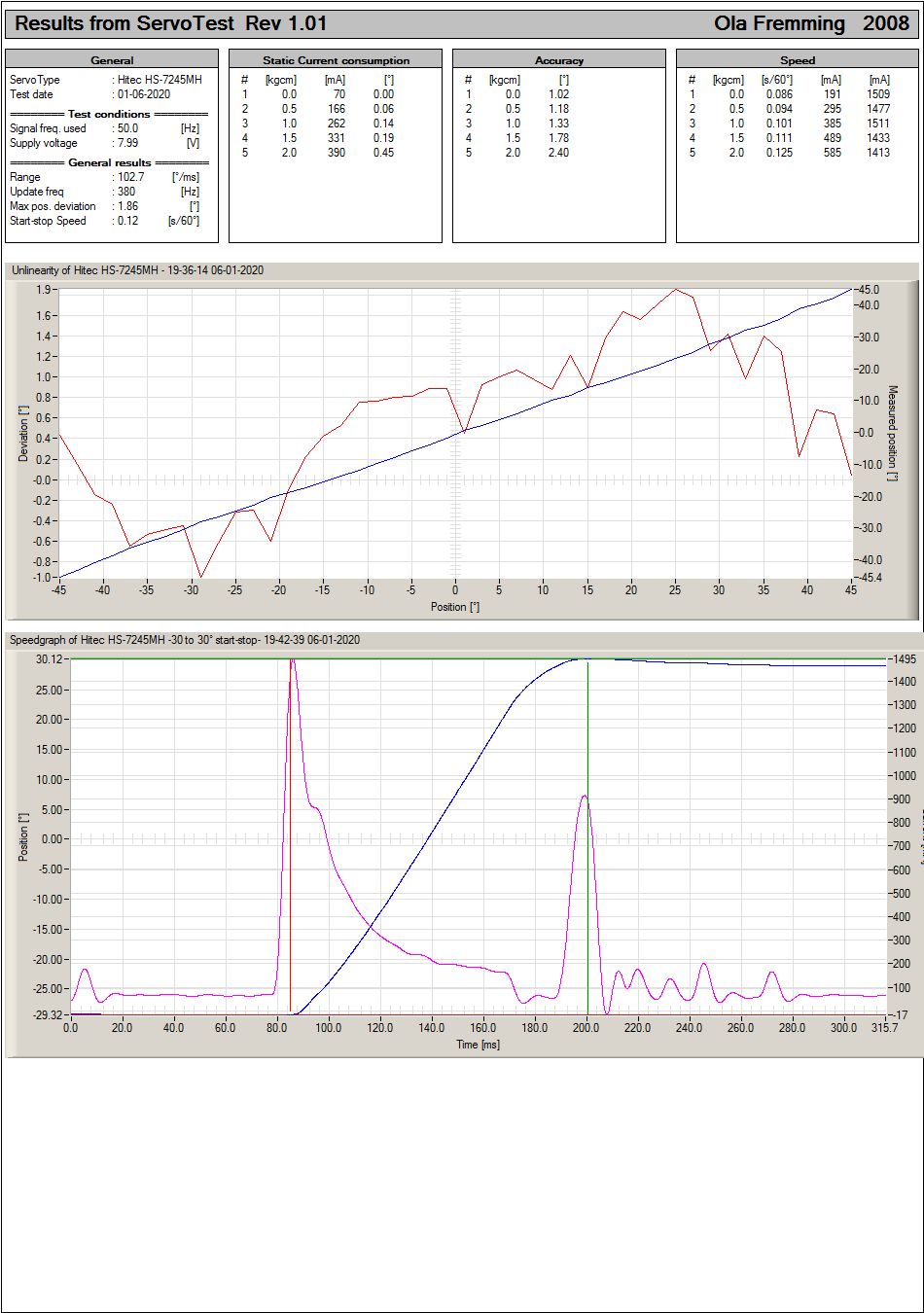
Hitec HS-7245MH |
34 |
32.4x16.8x32.8 |
0.11 |
6.4 |
Metal |
0.12 |
0.086 |
0.125 |
1.02 |
2.4 |
HS-7245MH |
NB
: HV, tested with 2sLiPo
|
|
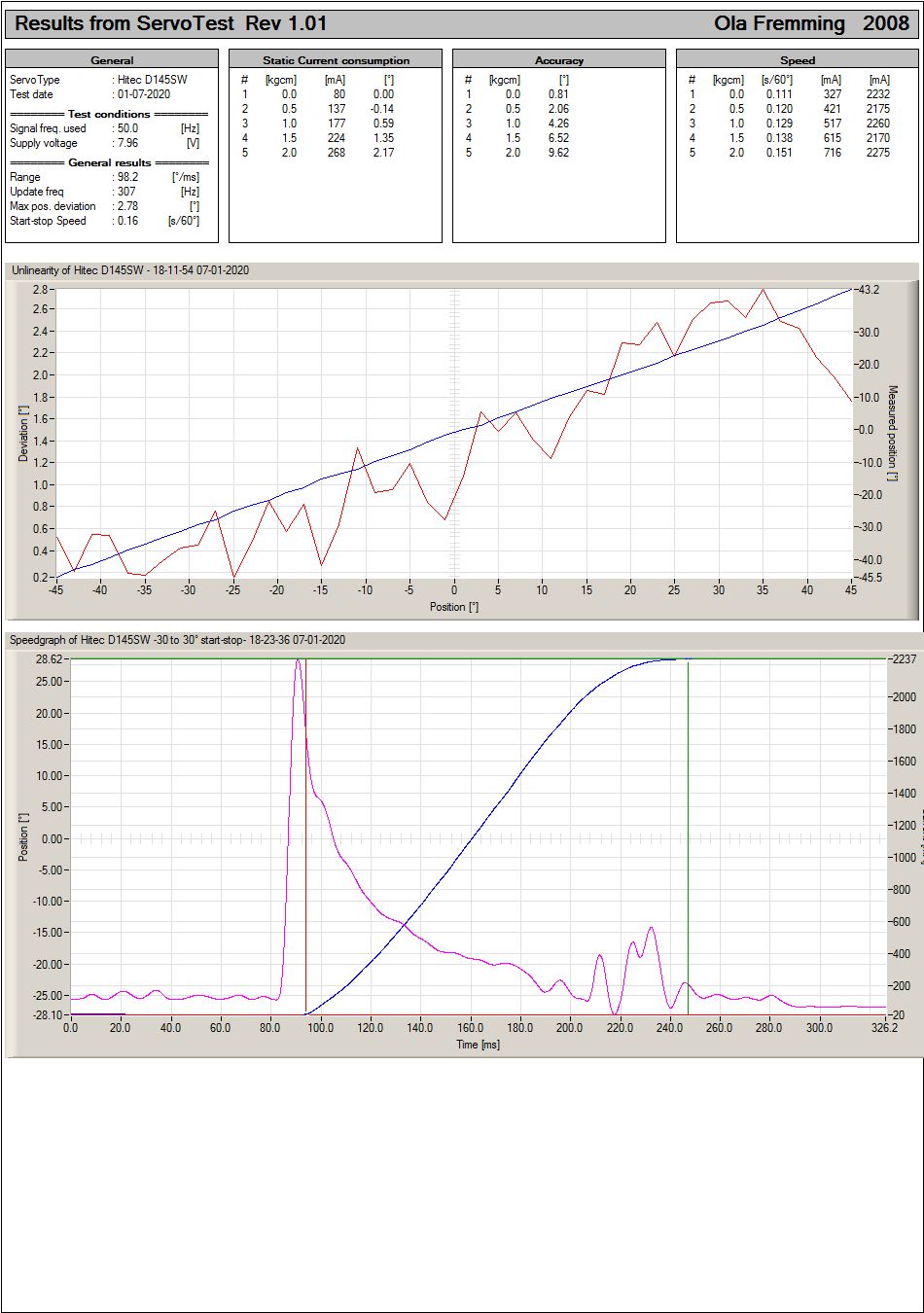
Hitech D-145SW |
24 |
30x10x37 |
0.14 |
6.0 |
Metal |
0.16 |
0.11 |
0.15 |
0.8 |
9.6 |
D-145SW |
NB
: HV, tested with 2sLiPo |
|
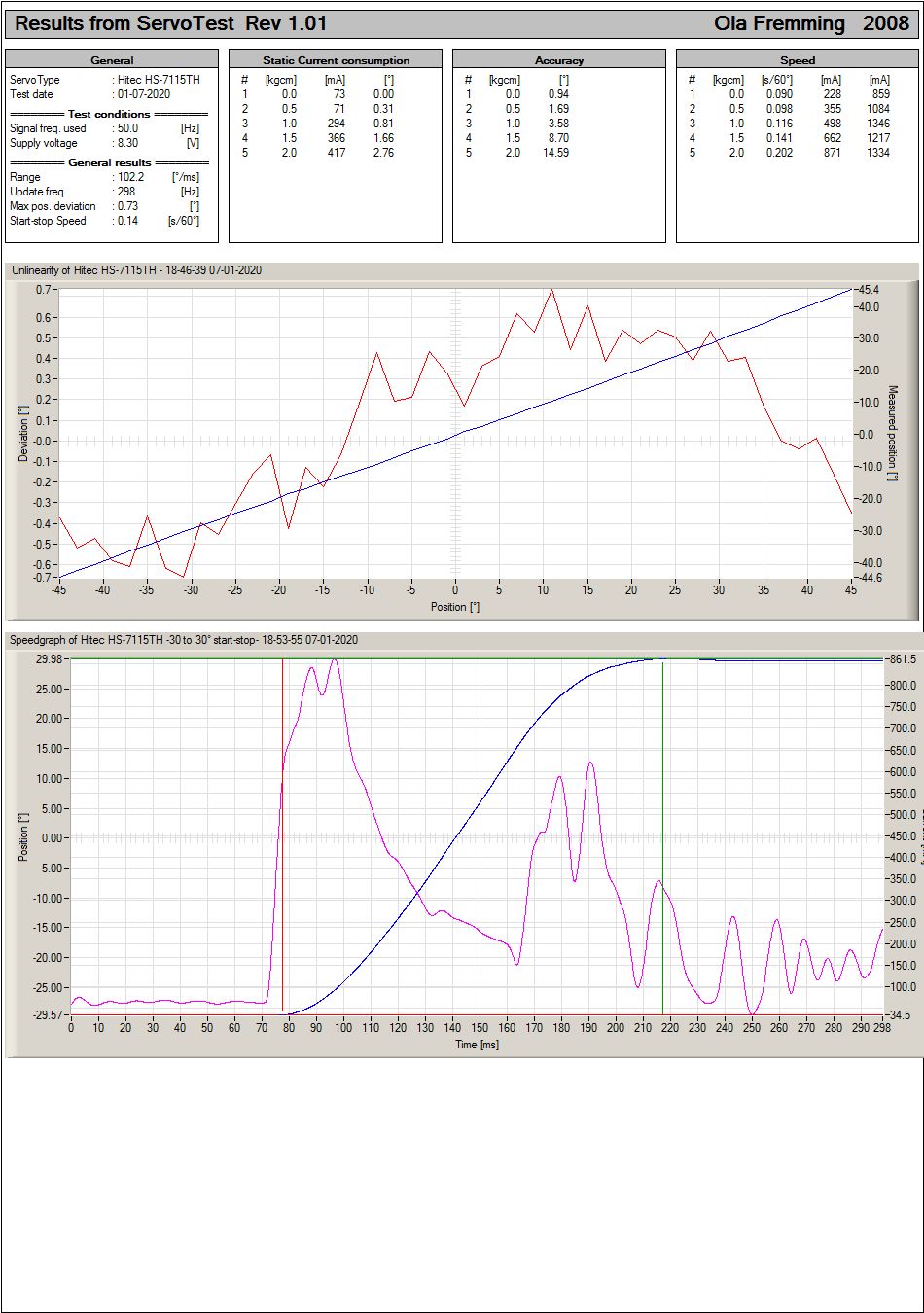
Hitec HS-7115TH |
20 |
26x8x38 |
0.1 |
3.9 |
Metal |
0.14 |
0.09 |
0.20 |
0.94 |
14.6 |
HS-7115TH |
NB
: HV, tested with 2sLiPo |
|
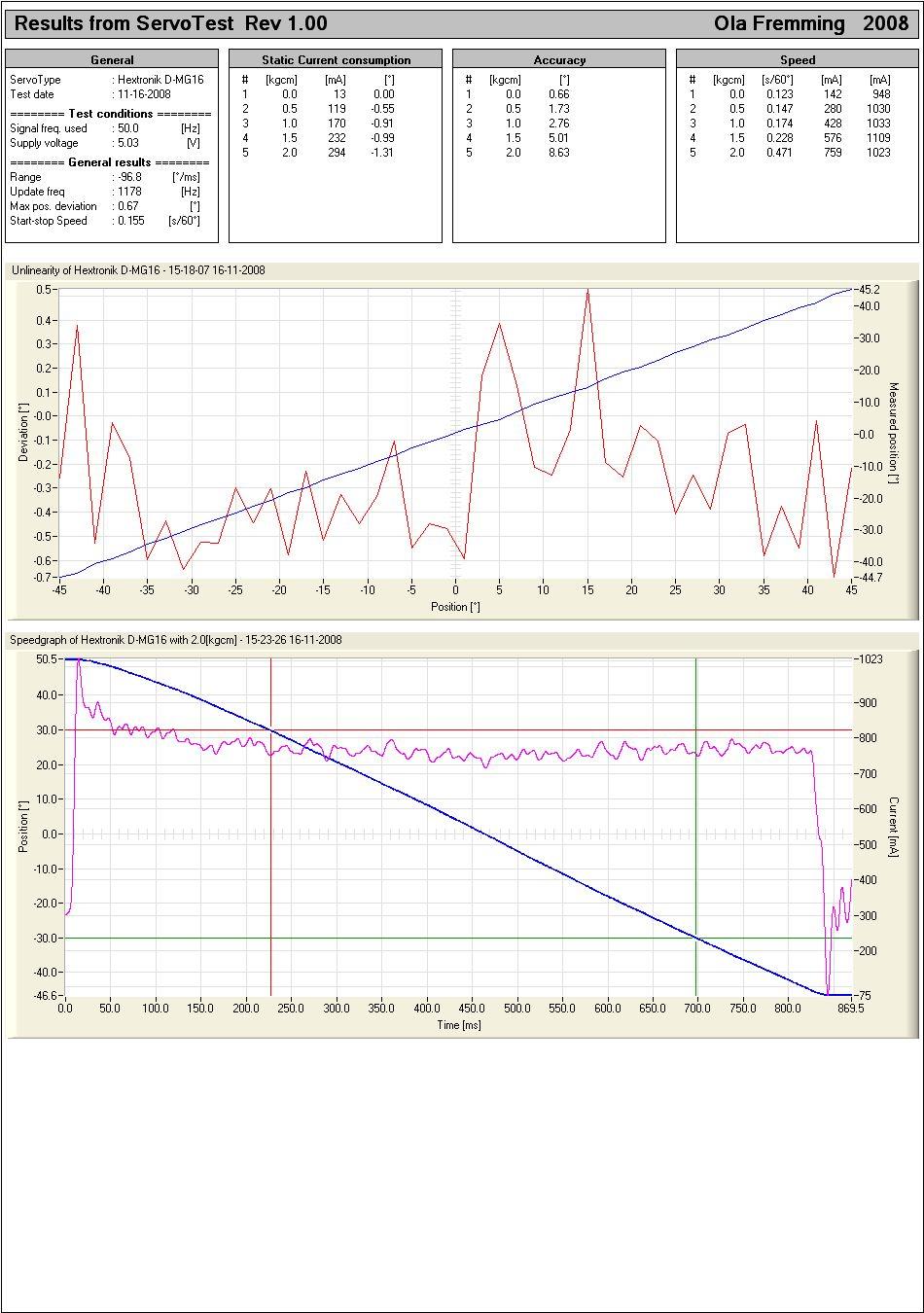
=== HEXTRONIC === |
| Hextronik
D-MG16 |
19 |
29x29x11.2 |
0.08 |
2.9 |
Metal |
0.16 |
0.12 |
0.47 |
0.66 |
8.6 |
D-MG16 |
|
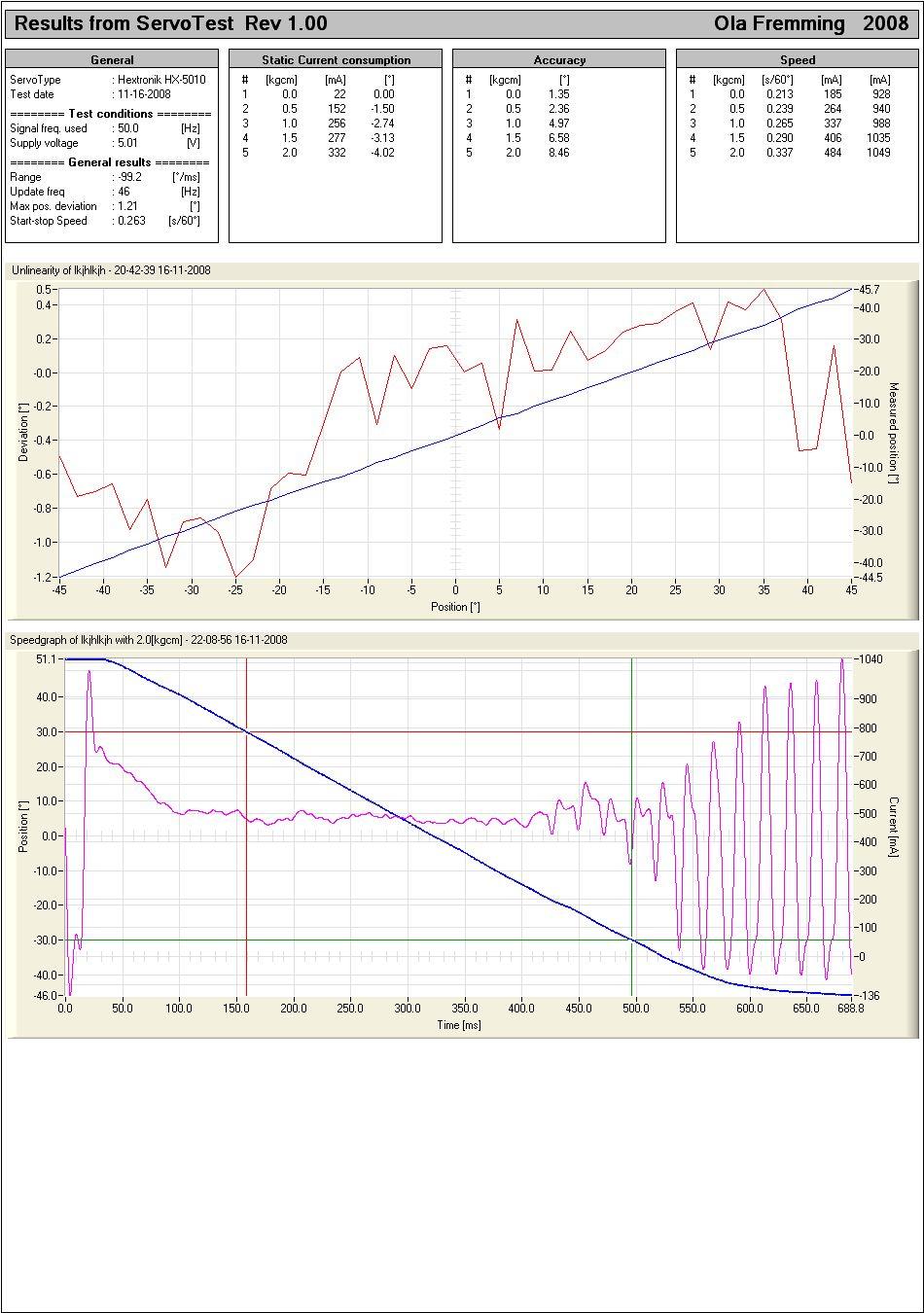
| Hextronik
HX-5010 |
39 |
40x38x20 |
0.16 |
6.5 |
Plastic |
0.26 |
0.21 |
0.34 |
1.35 |
8.5 |
HX-5010 |
|
|
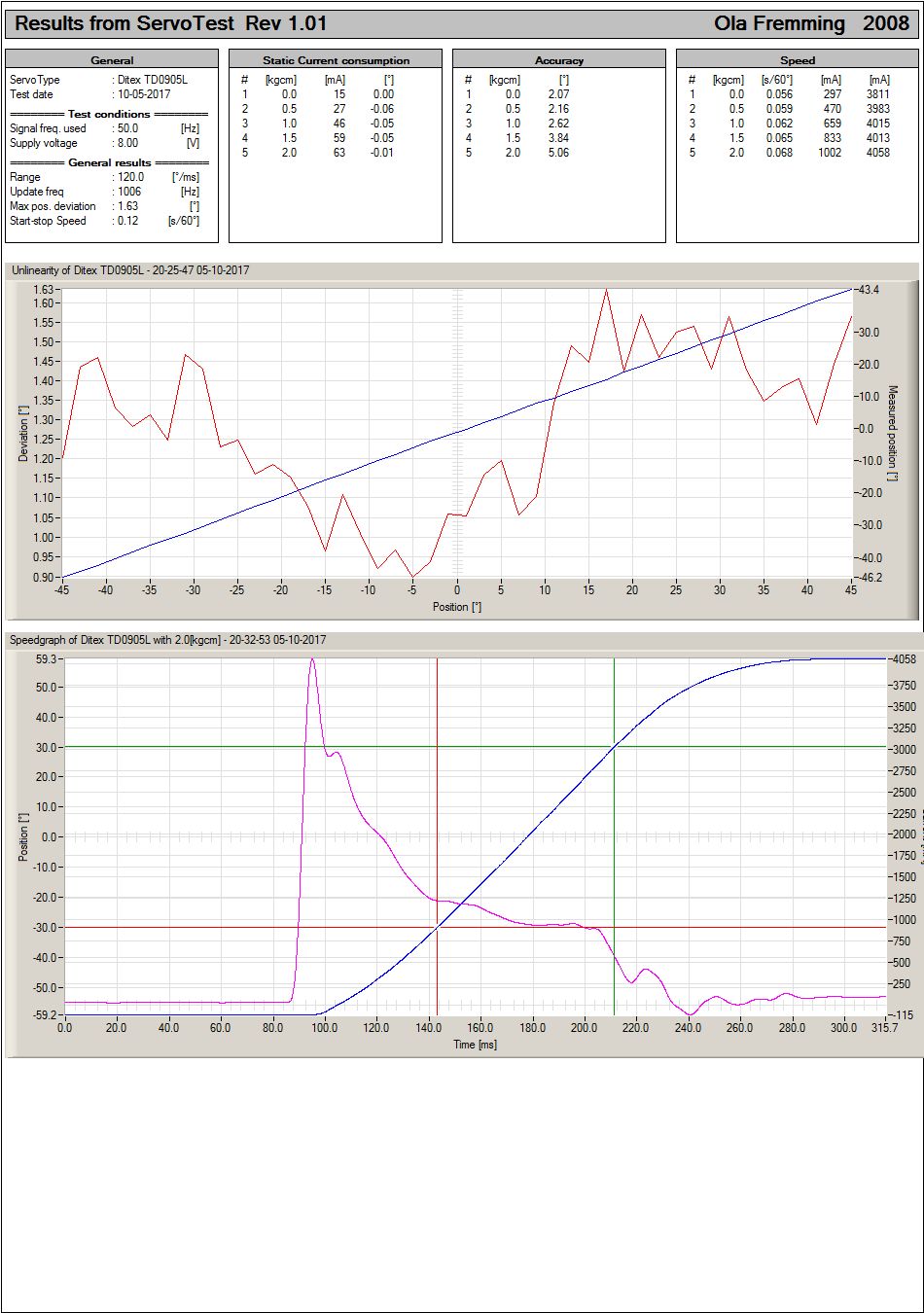
=== HACKER/ DITEX === |
|
Hacker Ditex TD0905L |
56 |
41x26.7x20 |
0.05 |
8.5 |
Metal |
0.12 |
0.056 |
0.068 |
2.07 |
5.06 |
TD0905L |
NB
: HV, tested with 2sLiPo |
|
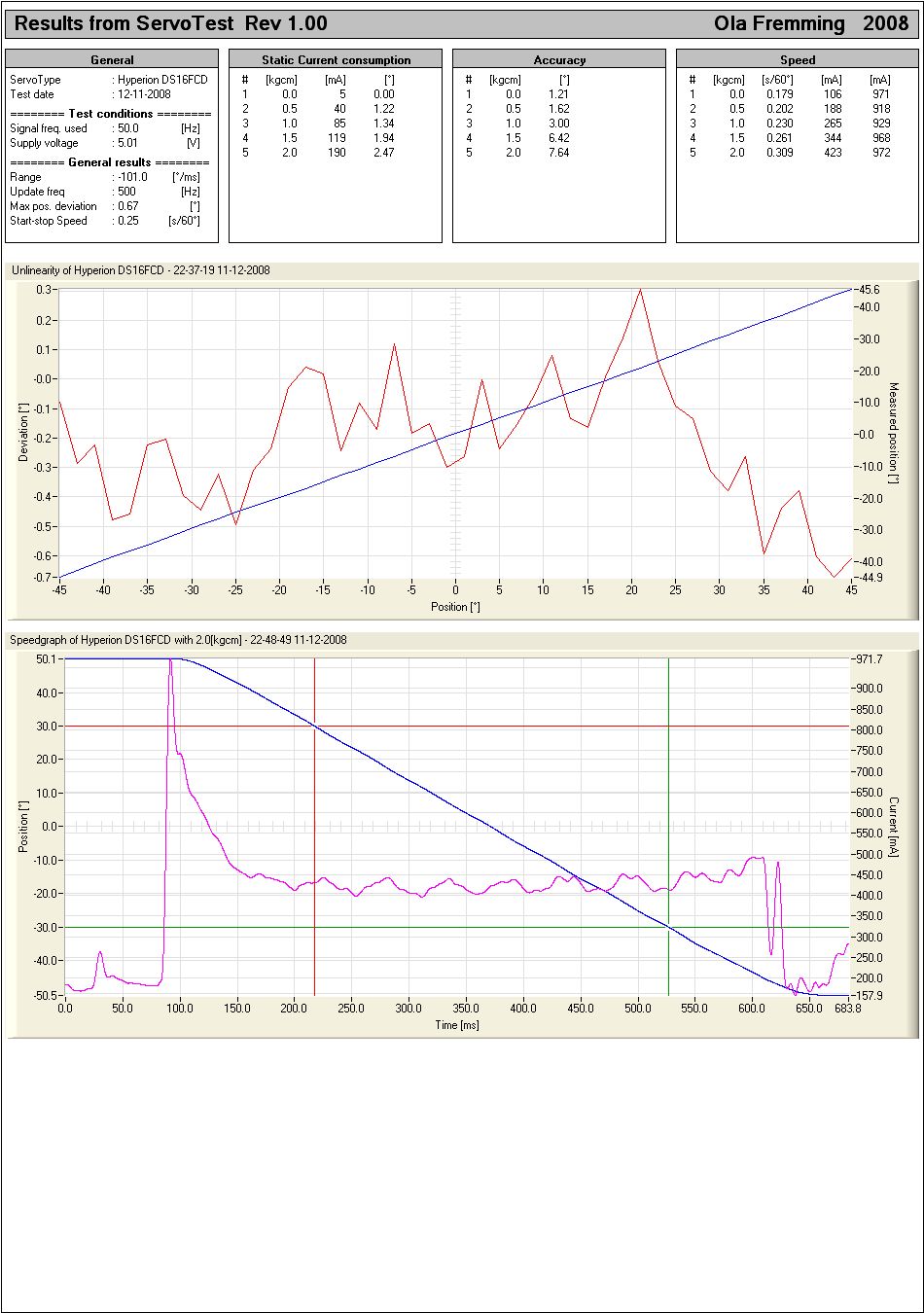
=== HYPERION === |
| Hyperion
DS16FCD |
25.5 |
32x31.5x16 |
0.18 |
4.5 |
Carbonite |
0.25 |
0.18 |
0.31 |
1.21 |
7.6 |
DS16FCD |
|
| Hyperion
DS20xSMD |
52.5 |
40x38.5x19.5 |
0.13 |
7.0 |
Metal |
0.18 |
0.12 |
0.18 |
0.71 |
2.4 |
DS20xSMD |
Very
good for the price |
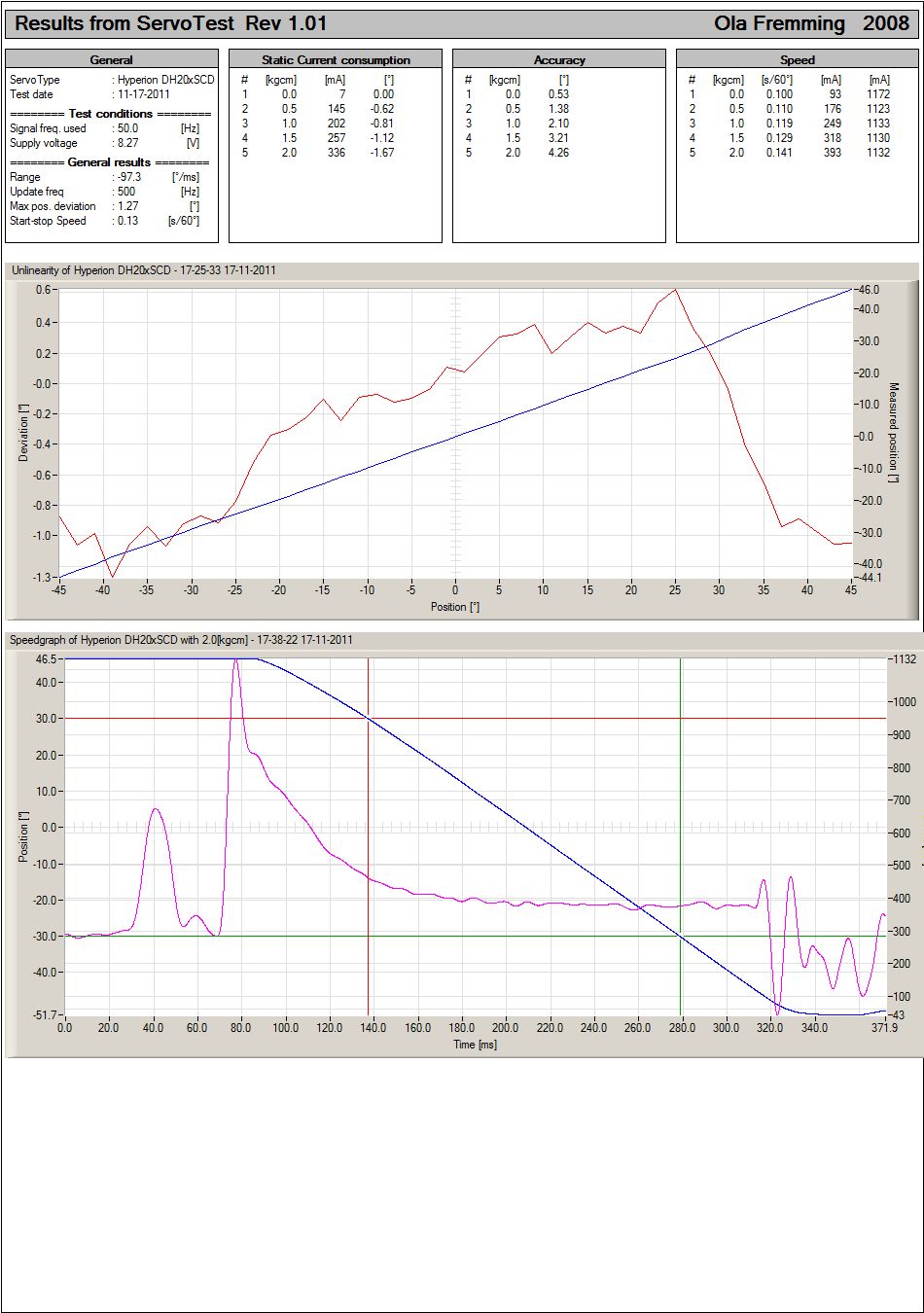
| Hyperion
DH20xSCD |
52 |
40x36.5x19.5 |
0.11 |
7.5 |
CarbonPoly |
0.13 |
0.10 |
0.141 |
0.53 |
4.26 |
DH20xSCD |
NB
: HV servo, tested with 2sLiPo |
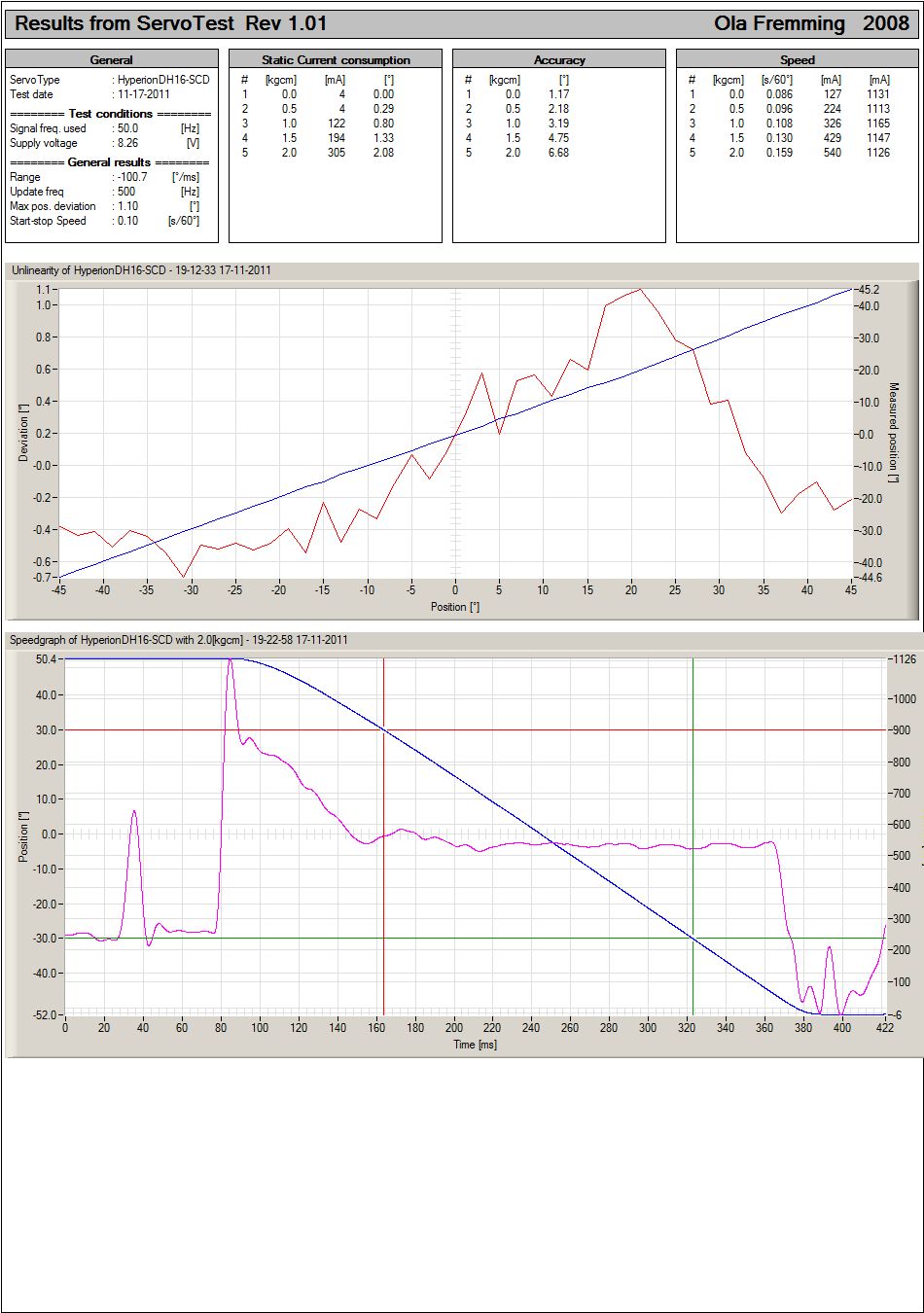
| Hyperion
DH16-SCD |
26.5 |
32x31.6x16 |
0.10 |
4.3 |
CarbonPoly |
0.10 |
0.086 |
0.159 |
1.17 |
6.68 |
DH16-SCD |
NB
: HV, tested with 2sLiPo |
|
Hyperion DH16-FMD |
31 |
32x31.6x16 |
0.14 |
6.0 |
Metal |
0.15 |
0.122 |
0.175 |
0.6 |
3.0 |
DH16-FMD |
NB
: HV, tested with 2sLiPo |
| ===
INO-LAB === |
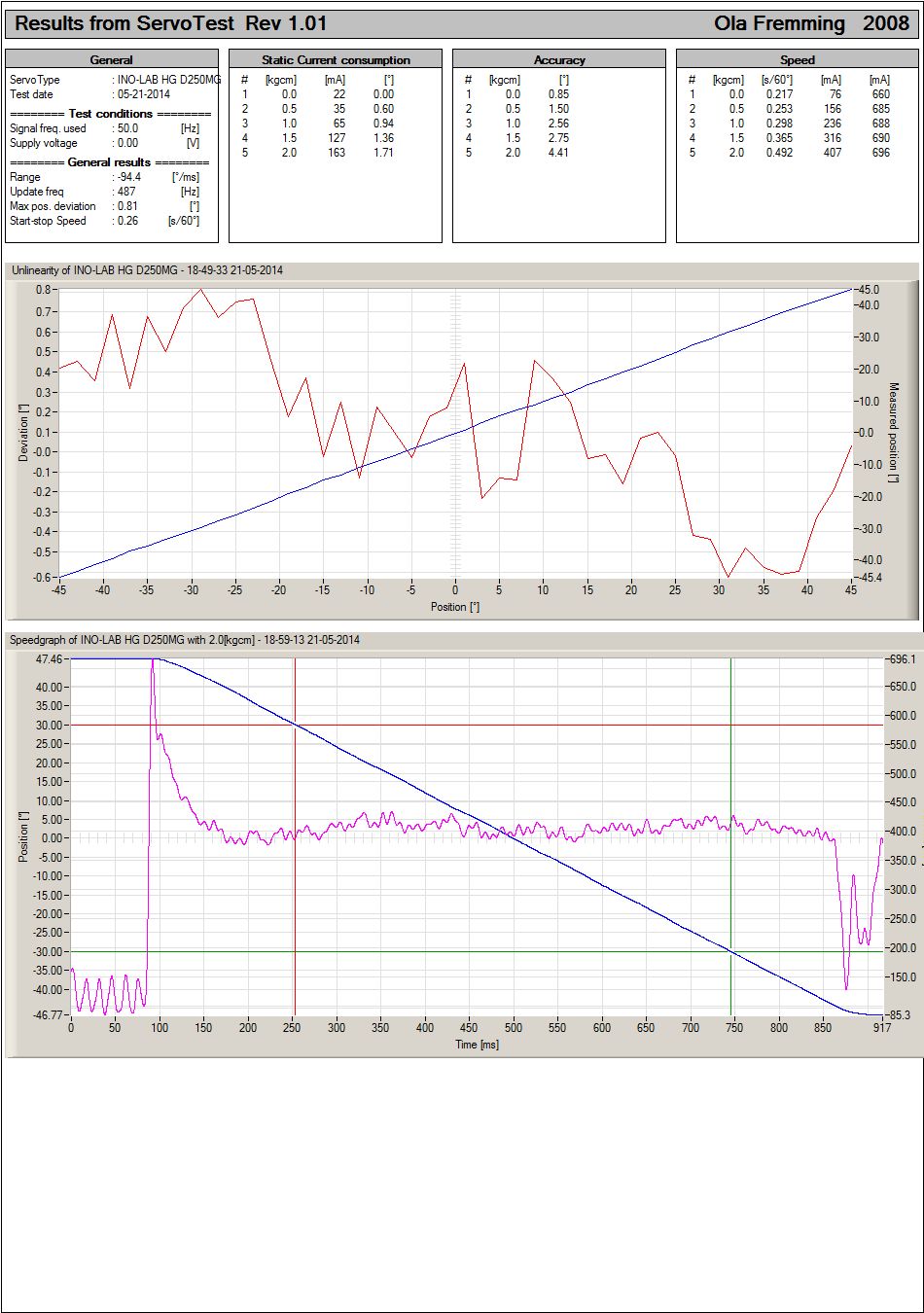
| INO-LAB
HG-D250MG |
21.1 |
30x31.5x13 |
0.21 |
4.0 |
Metal |
0.26 |
0.217 |
0.492 |
0.85 |
4.41 |
HG-D250MG |
Quite
good precision, but slow |
| ===
XQ === |
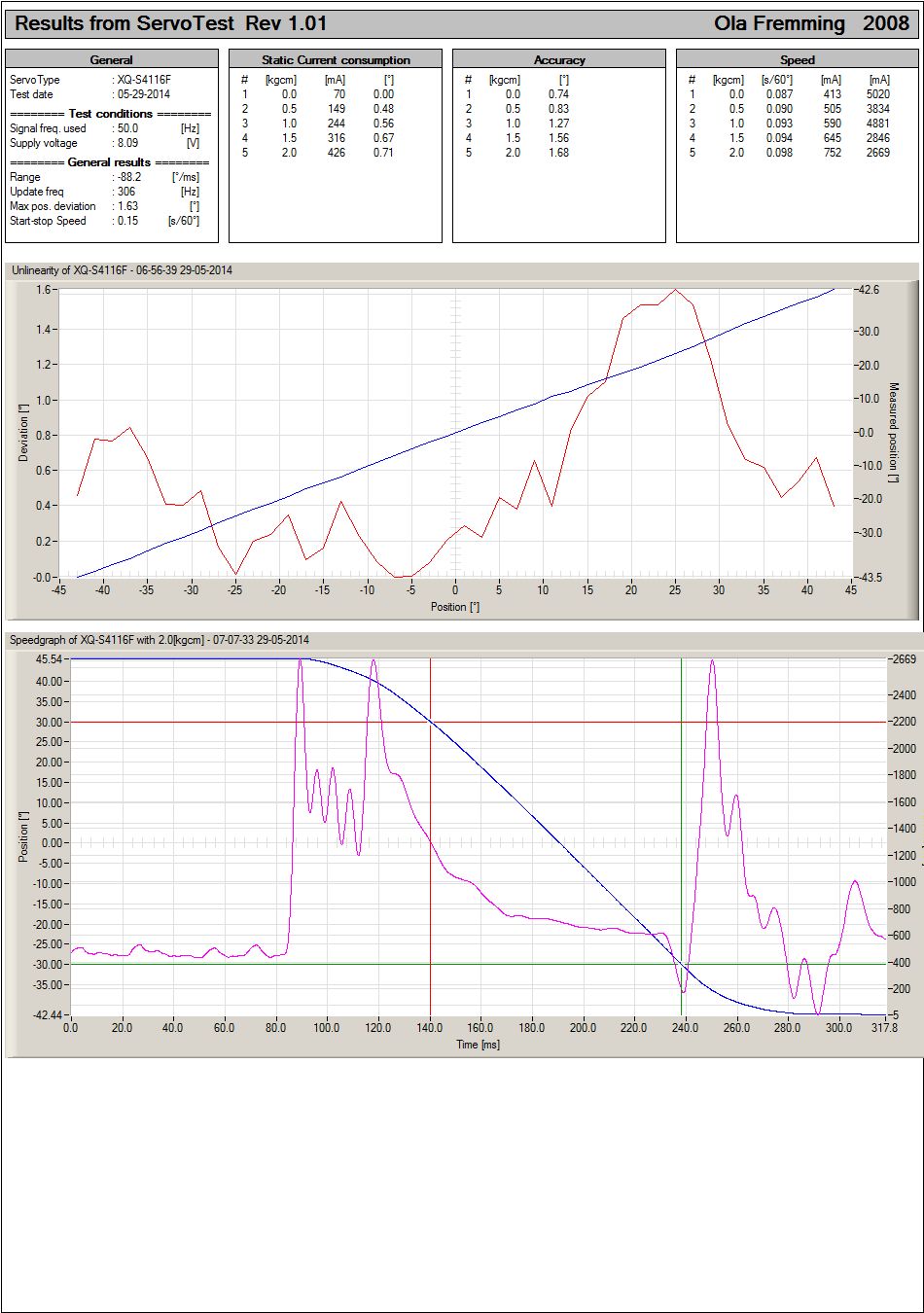
| XQ-S4116F |
56 |
40.2x38.8x20.1 |
0.08 |
15.0 |
Titanium |
0.15 |
0.087 |
0.098 |
0.74 |
1.68 |
XQ-S4116F |
|
|
=== MKS === |
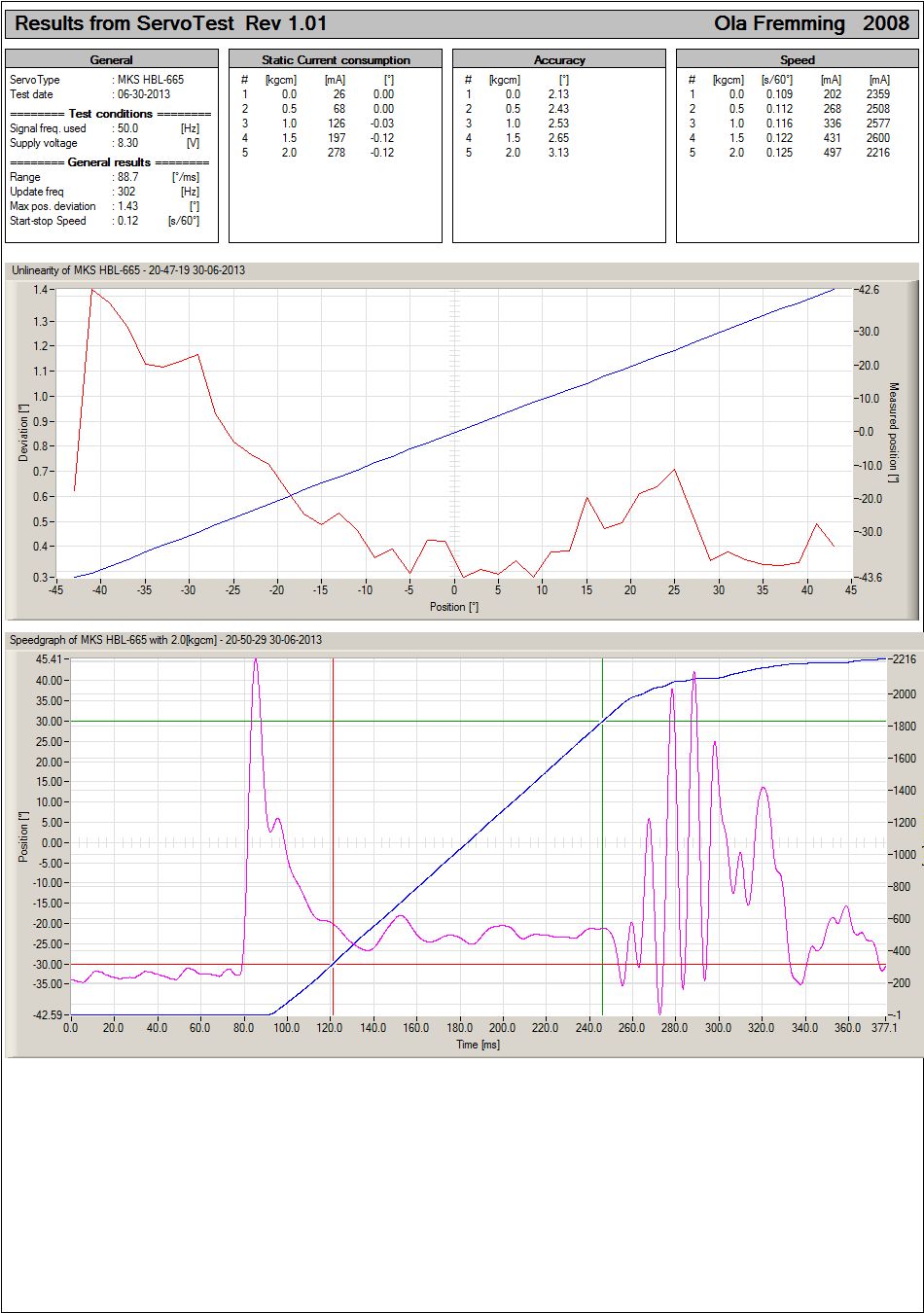
| MKS
HBL-665 |
63 |
40x40x20 |
0.10 |
15.2 |
Chrome-titanium |
0.12 |
0.109 |
0.125 |
2.13 |
3.13 |
MKS
HBL-665 |
NB
: HV servo, tested with 2sLiPo |
|
MKS HV6130 |
22.5 |
30x29.8x10 |
0.1 |
8.1 |
Metal |
0.19 |
0.114 |
0.152 |
1.18 |
2.84 |
HV6130 |
NB
: HV servo, tested with 2sLiPo |
|
MKS HV737 |
38.5 |
34.5x28.6x15 |
0.09 |
10.2 |
Metal |
0.12 |
0.093 |
0.125 |
1.17 |
1.96 |
HV737 |
NB
: HV servo, tested with 2sLiPo |
|
MKS HV69 |
21 |
29x13x29 |
0.1 |
10.2 |
Metal |
0.17 |
0.11 |
0.156 |
0.84 |
2.65 |
HV69 |
NB
: HV servo, tested with 2sLiPo |
|
=== SANWA === |
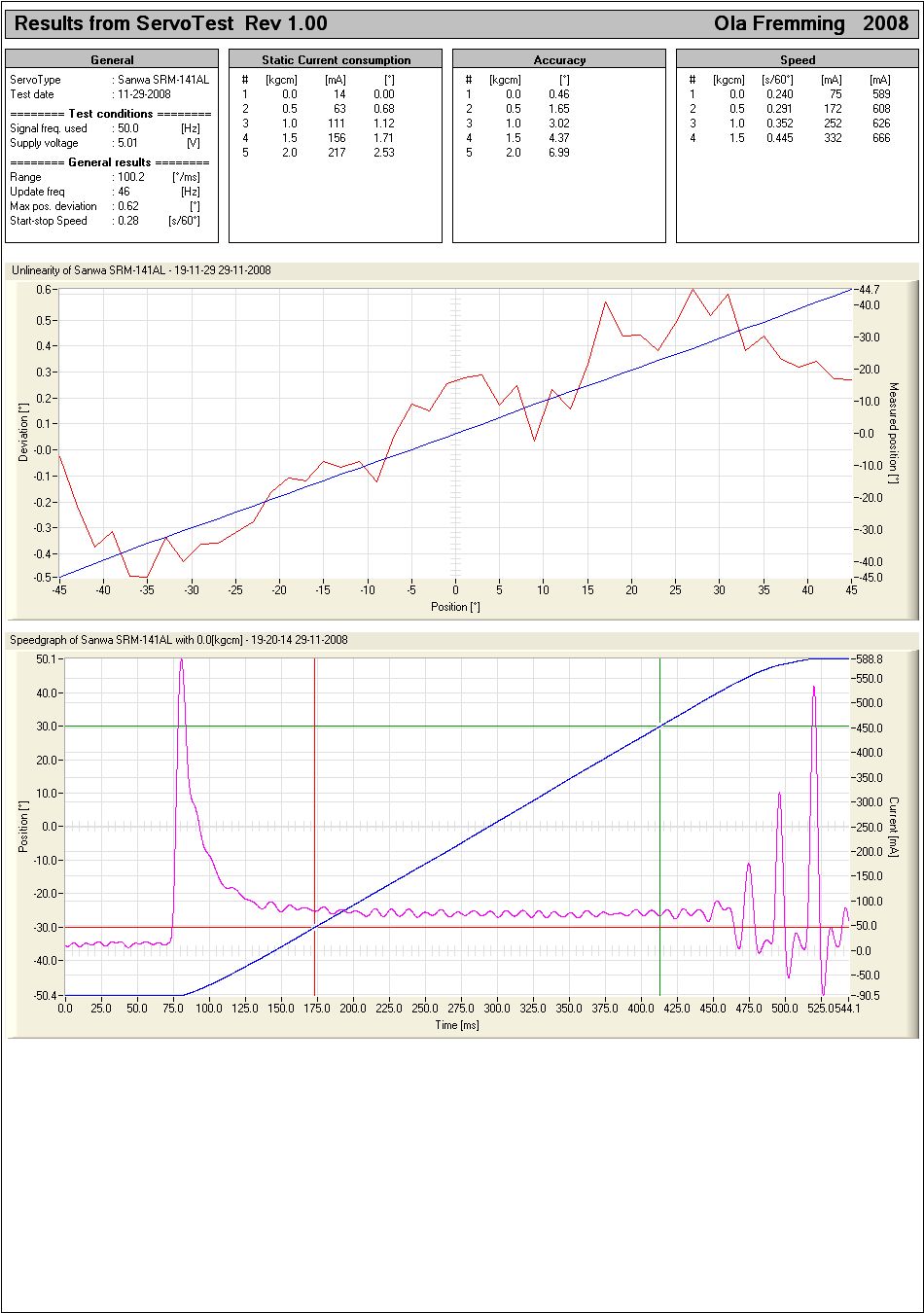
| Sanwa
SRM-141AL |
33 |
31x31x15 |
0.25 |
3.2 |
Metal |
0.28 |
0.24 |
0.45* |
0.46 |
7.0 |
SRM-141AL |
*Tested
at 1.5kgcm, failed test at 2kgcm |
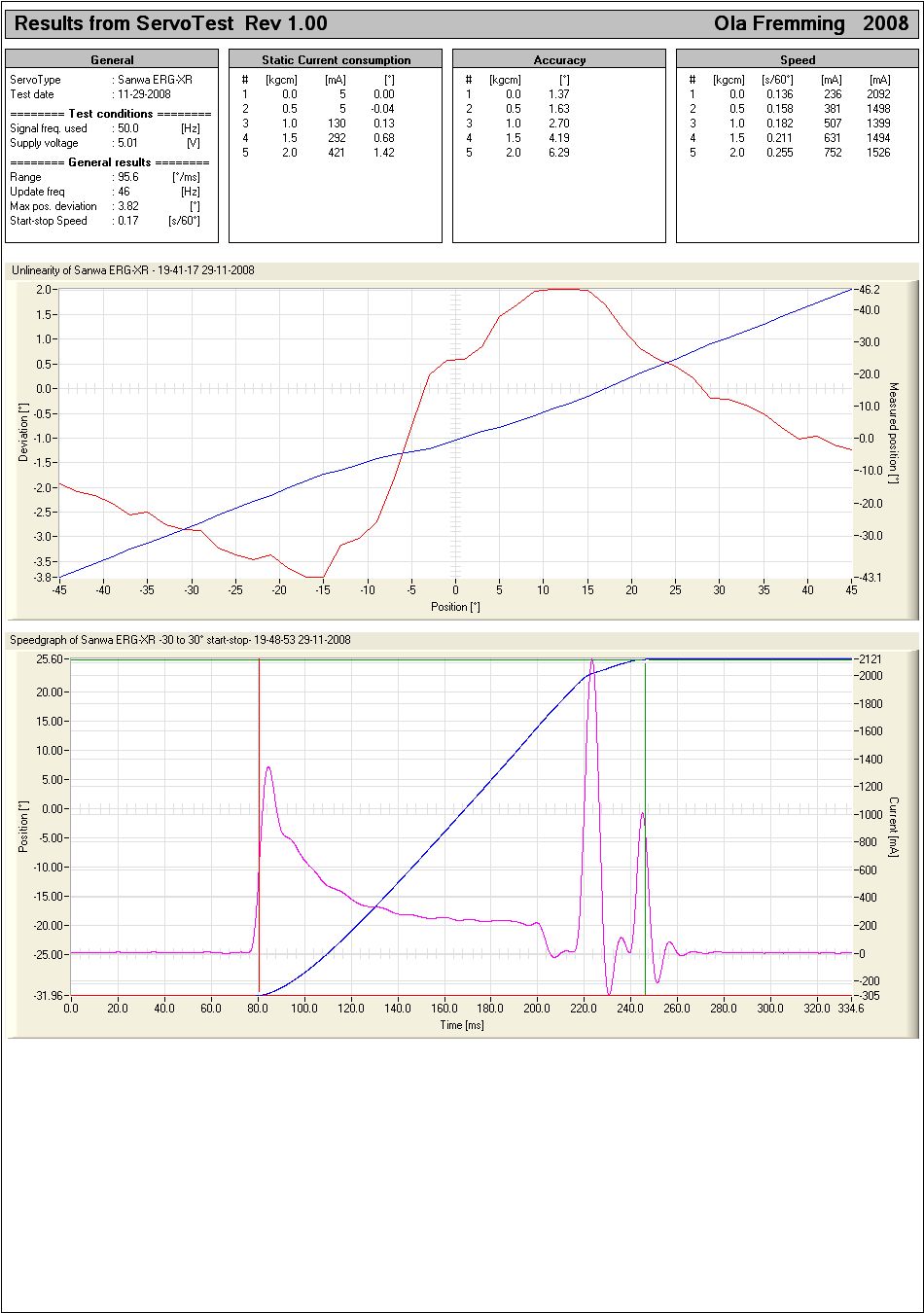
| Sanwa
ERG-XT |
65 |
39x37x20 |
0.12 |
7.3 |
Metal |
0.17 |
0.14 |
0.26 |
1.37 |
6.3 |
ERG-XT |
|
| ===
GRAUPNER === |
| Graupner/JR
C512 |
45 |
40x38x19 |
0.25 |
2.7 |
Plastic |
0.25 |
0.21 |
0.53 |
1.18 |
16.3 |
C512 |
|
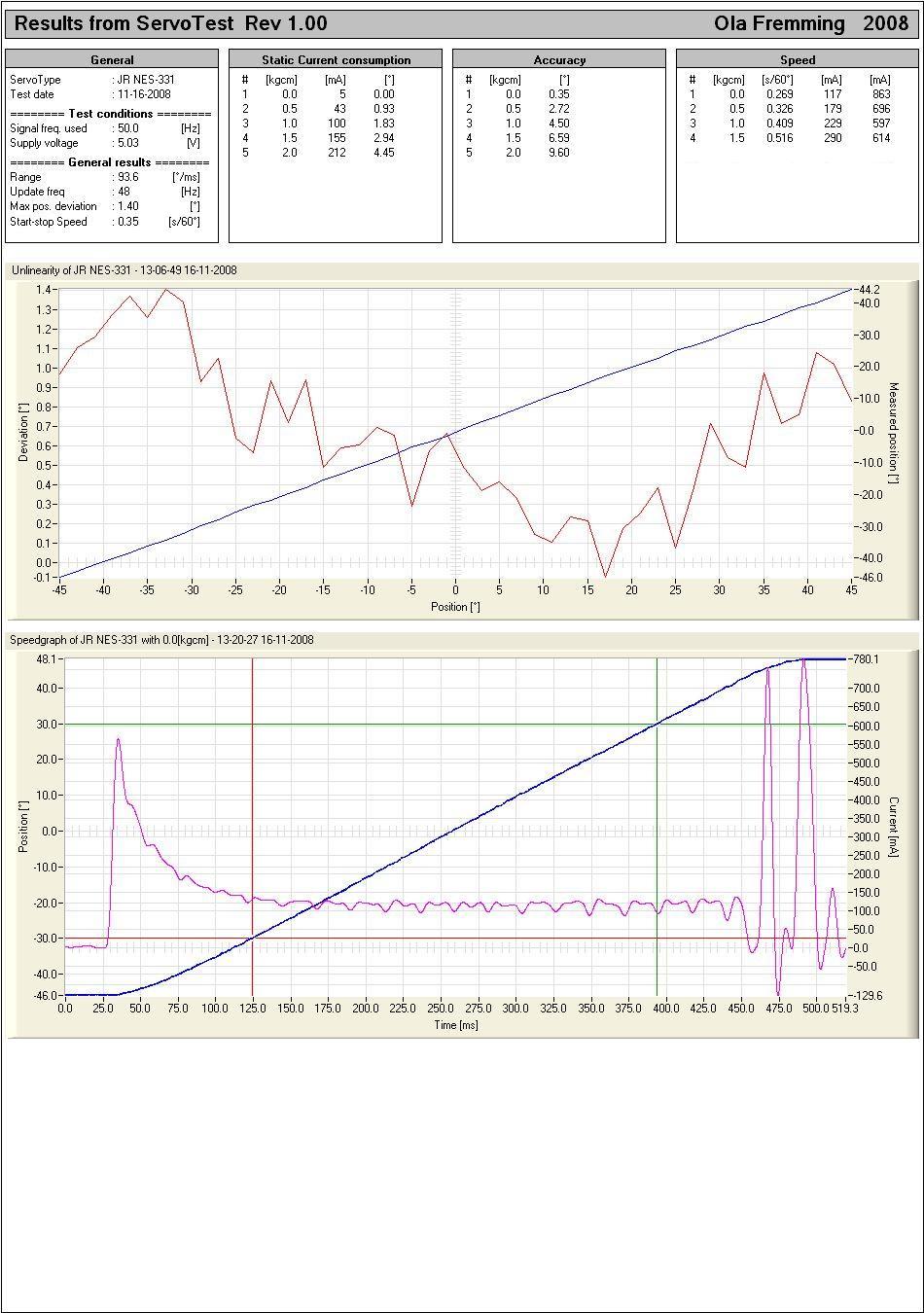
| JR
NES 331 |
18 |
30x28.5x13 |
0.23 |
3.25 |
Plastic |
0.31 |
0.27 |
0.52* |
0.35 |
9.6 |
NES-331 |
*Tested
at 1.5kgcm, failed test at 2kgcm |
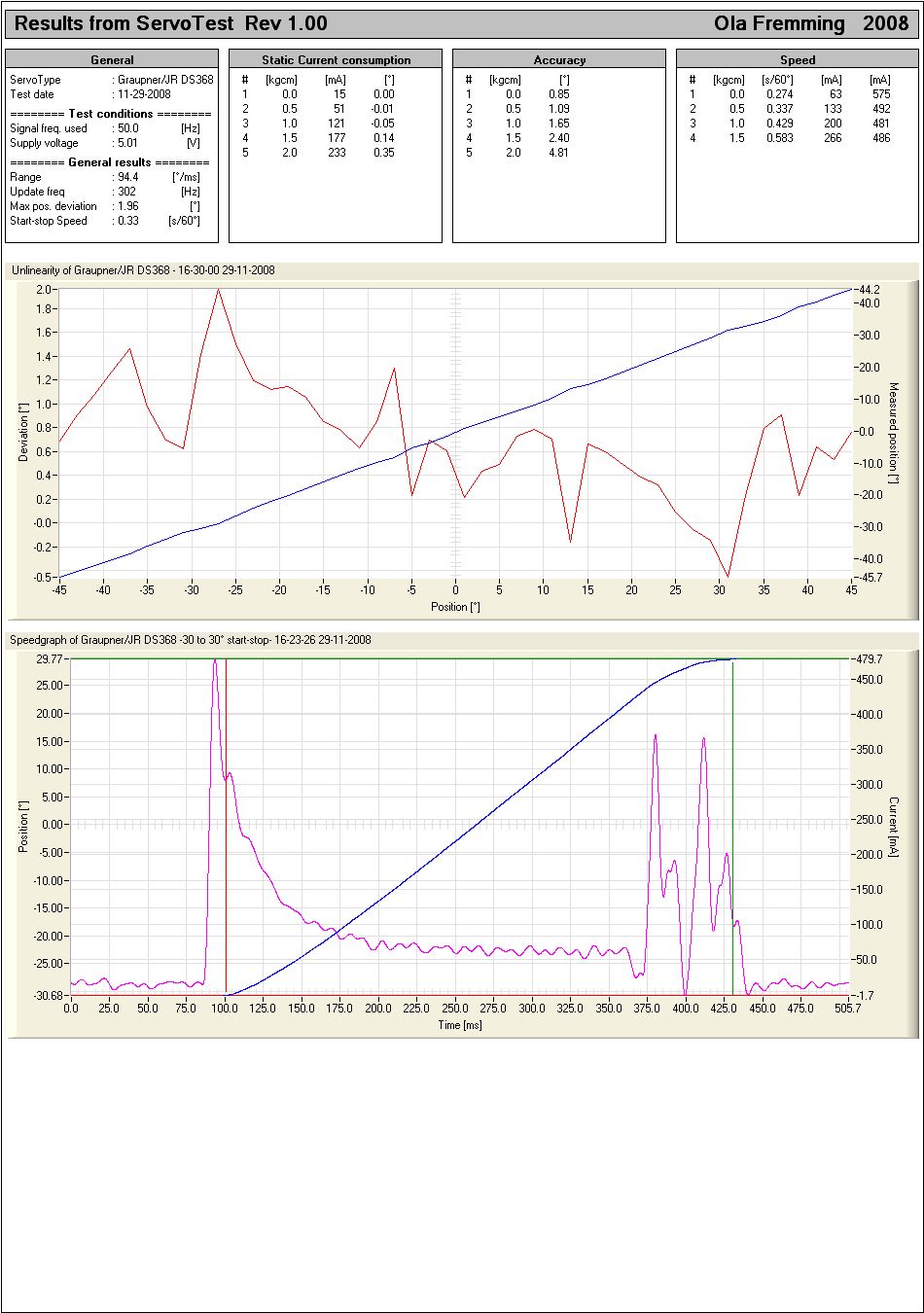
| Graupner/JR
DS368 |
22 |
30x28.5x13 |
0.24 |
3.8 |
Metal |
0.33 |
0.27 |
0.58* |
0.85 |
4.8 |
DS368 |
*Tested
at 1.5kgcm, failed test at 2kgcm |
| Graupner
HBS-760 |
52 |
40x39.5x19.5 |
0.055 |
10.5 |
Carbon |
0.08 |
0.063 |
0.075 |
0.68 |
3.44 |
HBS-760 |
NB
: HV servo, tested with 2sLiPo |
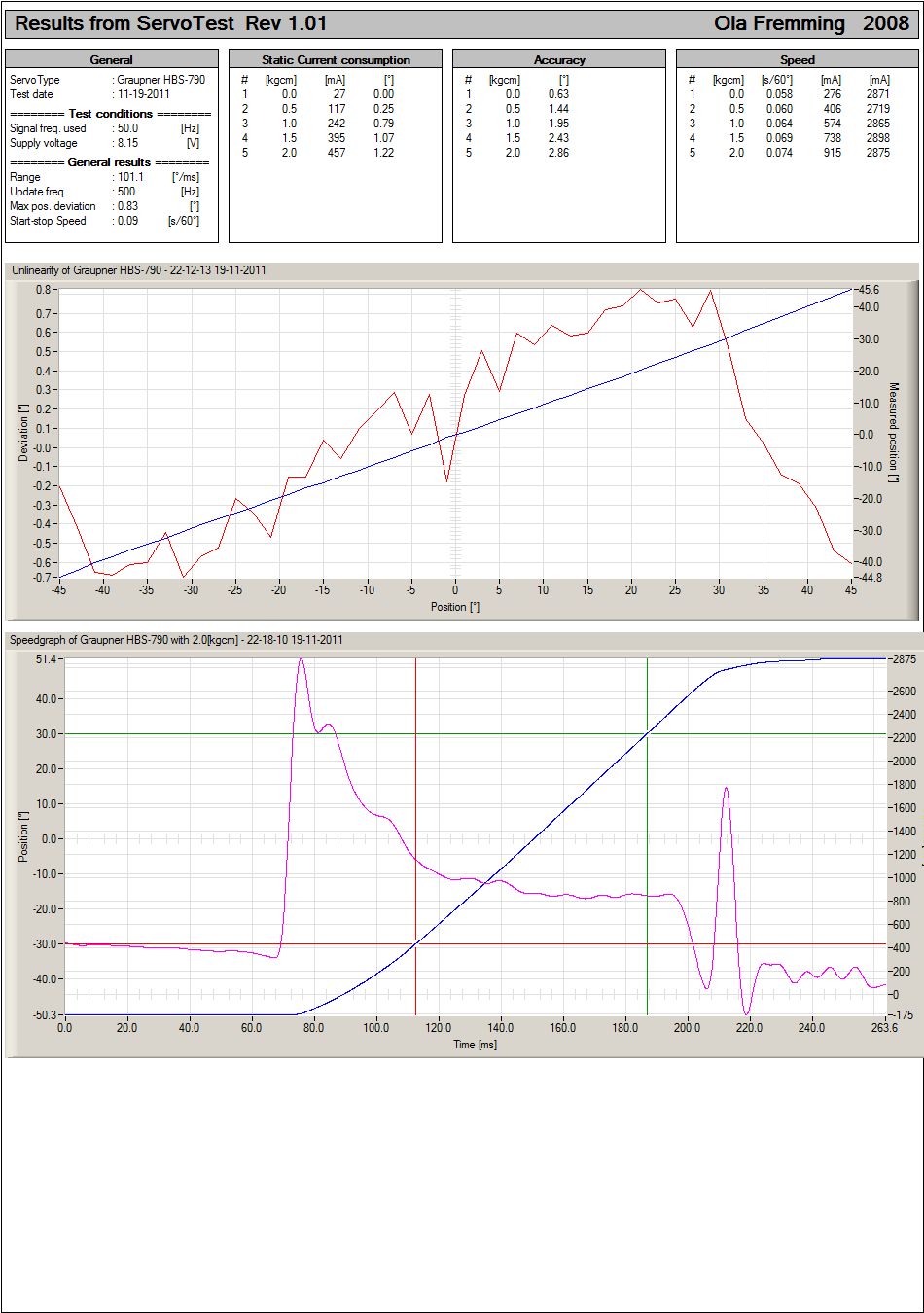
| Graupner
HBS-790 |
43 |
40x25.5x19.5 |
0.055 |
7.0 |
Metal |
0.09 |
0.058 |
0.074 |
0.63 |
2.86 |
HBS-790 |
NB
: HV servo, tested with 2sLiPo |
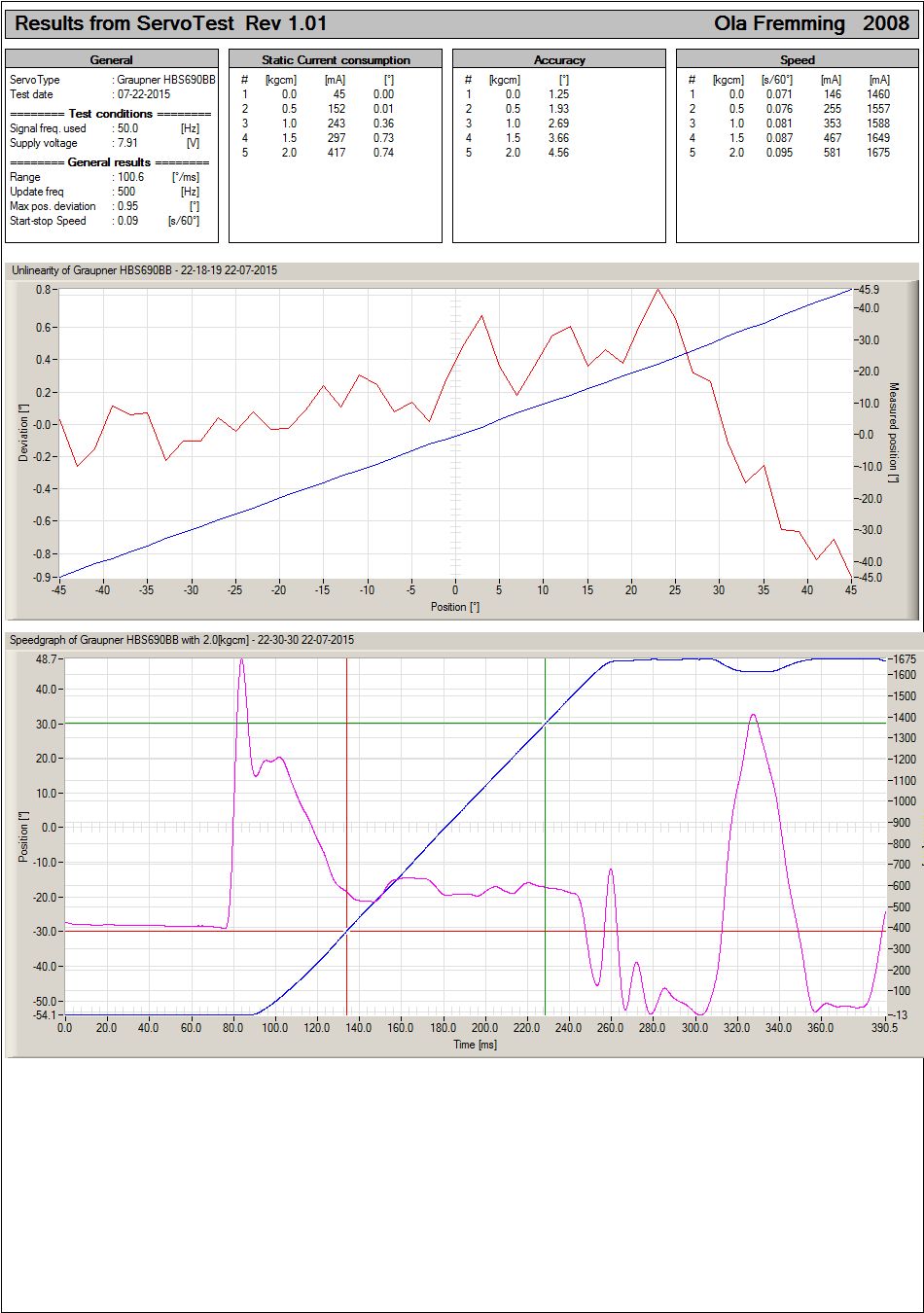
| Graupner
HBS-690 BB |
32 |
35x16x34.5 |
0.075 |
6.0 |
Carbon |
0.09 |
0.071 |
0.095 |
1.25 |
4.56 |
HBS-690-BB |
NB
: HV servo, tested with 2sLiPo |
|
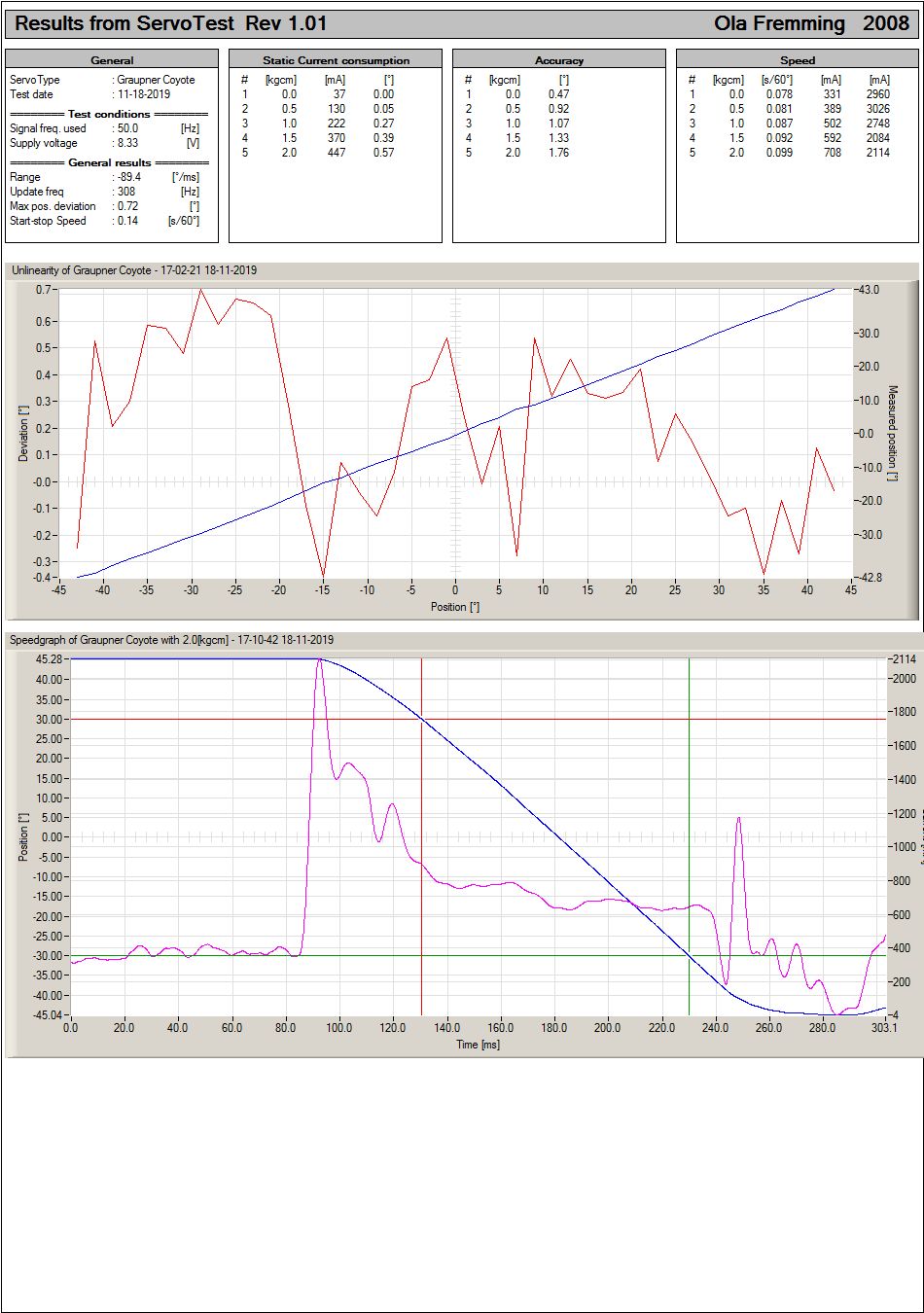
Graupner Coyote |
22 |
23x27x12 |
0.075 |
4.0 |
Metal |
0.14 |
0.078 |
0.099 |
0.47 |
1.76 |
Coyote |
NB : HV servo, tested with 2sLiPo |
|
=== JR === |
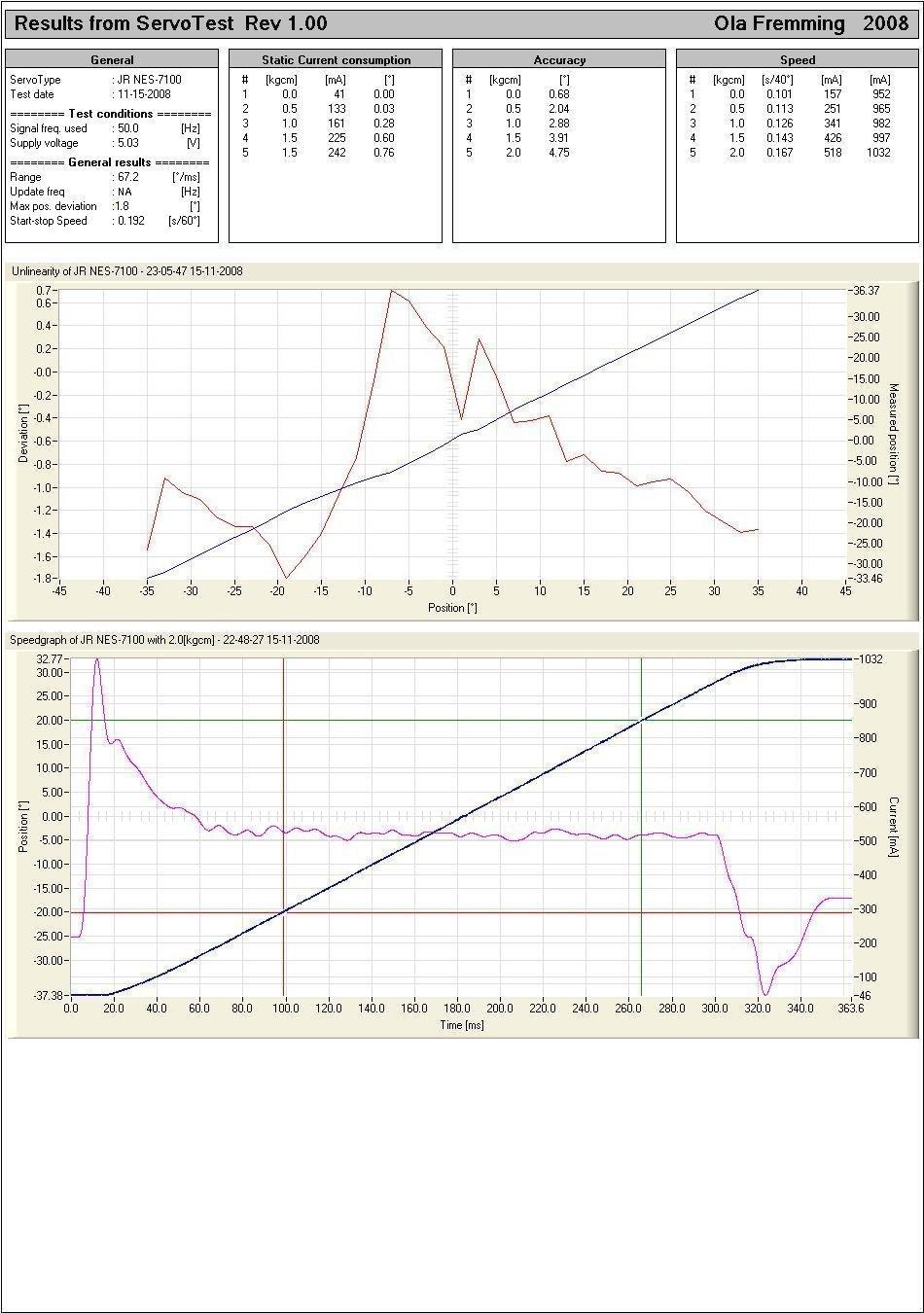
| JR
NES-7100 |
43 |
44x26x22 |
0.14 |
4.8 |
Metal |
0.19 |
0.15 |
0.17 |
0.68 |
4.8 |
NES-7100 |
|
| JR
DS-3421SA |
26 |
33x26x15 |
0.18 |
4.6 |
Plastic/metal |
0.21 |
0.17 |
0.27 |
0.63 |
4.0 |
DS-3421SA |
|
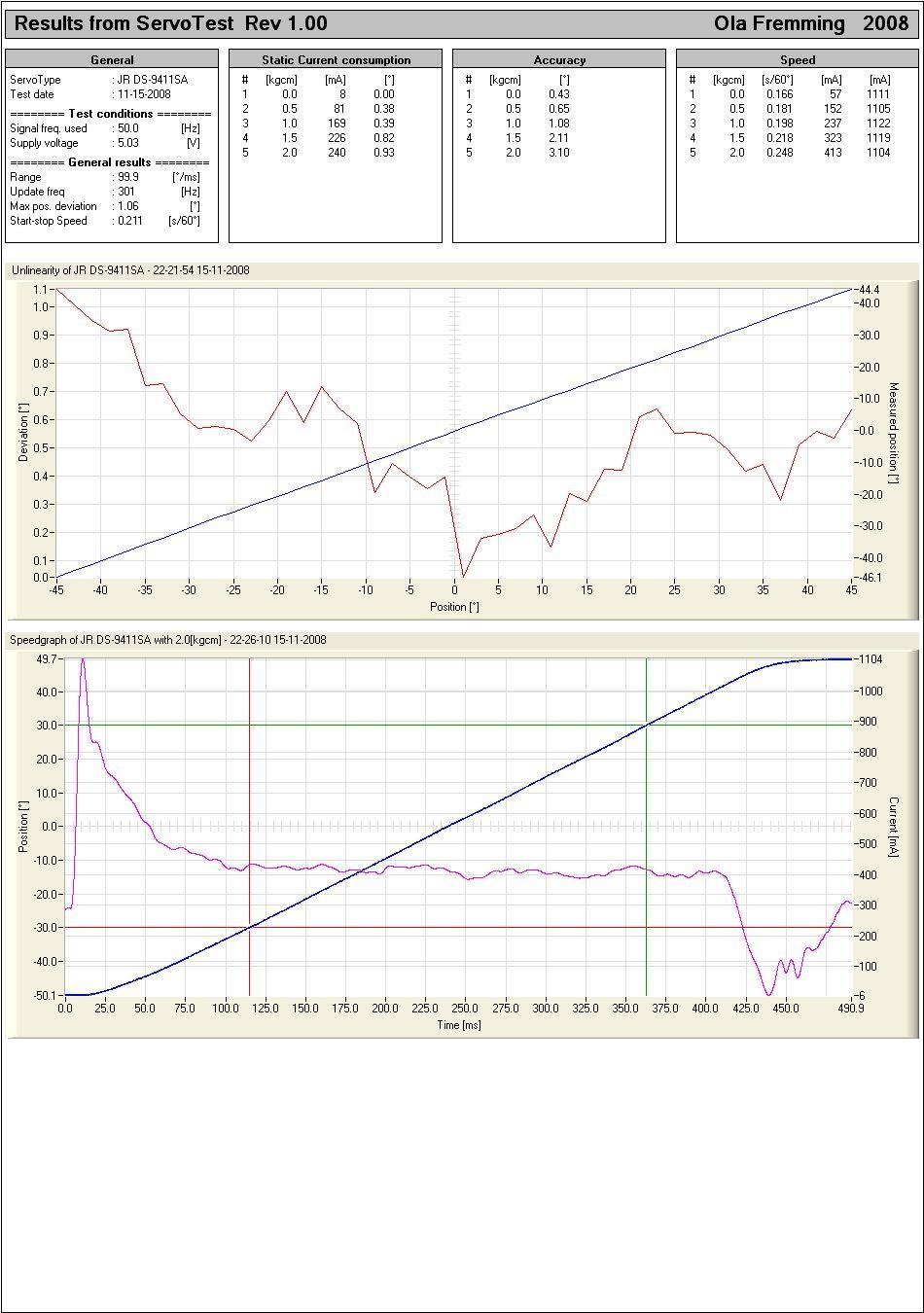
| JR
DS-9411SA |
39 |
36x26x19 |
0.15 |
5.9 |
Plastic/metal |
0.21 |
0.17 |
0.25 |
0.43 |
3.1 |
DS-9411SA |
|
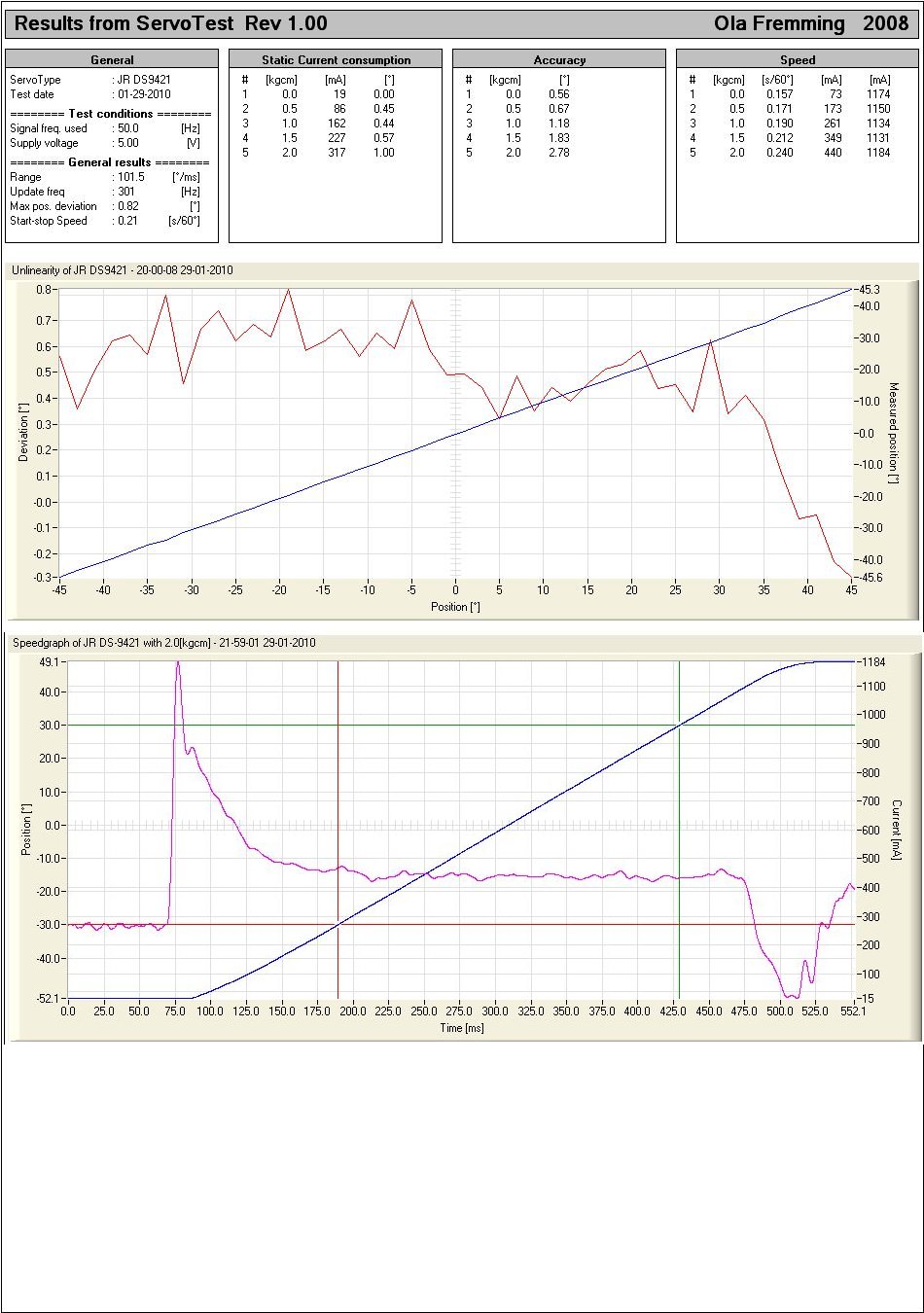
| JR
DS-9421 |
38 |
36x26x19 |
0.17 |
5.0 |
Plastic/metal |
0.21 |
0.16 |
0.24 |
0.56 |
2.78 |
DS-9421 |
|
| JR
DS8900G |
59 |
41x38x20 |
0.05 |
3.5 |
Plastic |
0.08 |
0.057 |
0.14 |
0.08 |
3.8 |
DS8900G |
|
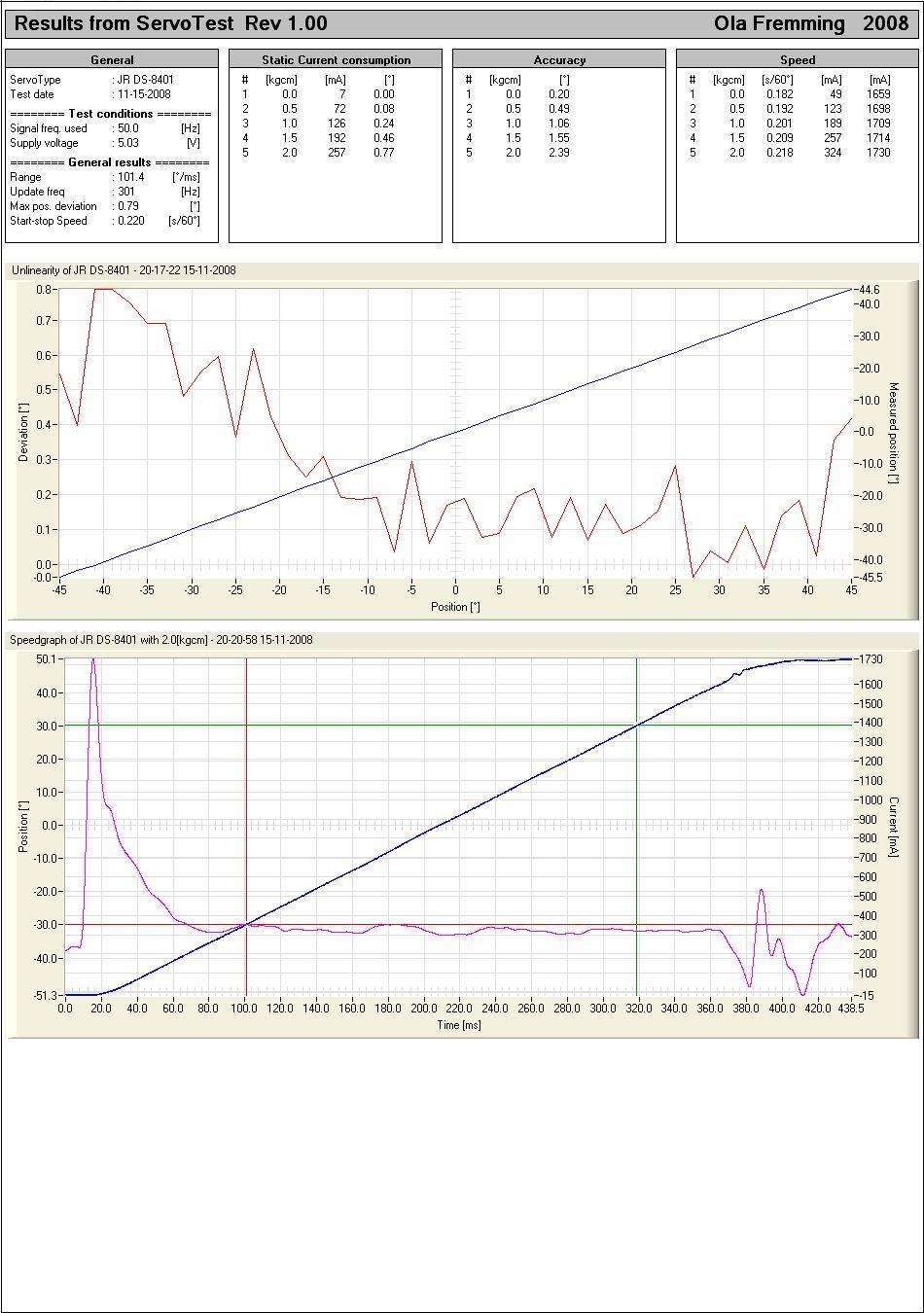
| JR
DS-8401 |
49 |
39x35x19 |
0.19 |
11.0 |
Plastic |
0.22 |
0.18 |
0.22 |
0.2 |
2.4 |
DS-8401 |
|
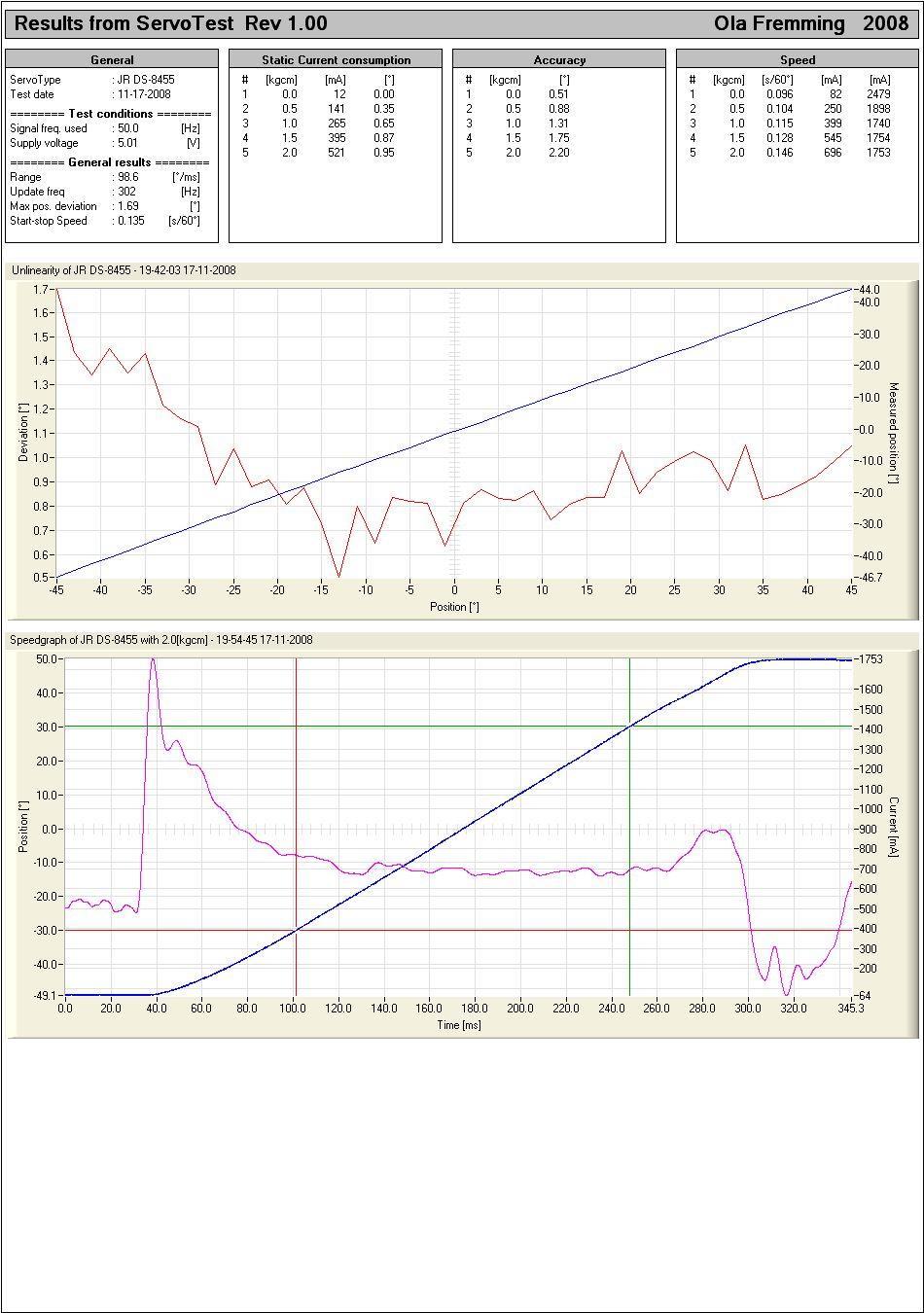
| JR
DS-8455 |
60 |
39x35x19 |
0.10 |
6.5 |
Metal |
0.14 |
0.096 |
0.15 |
0.51 |
2.2 |
DS-8455 |
|
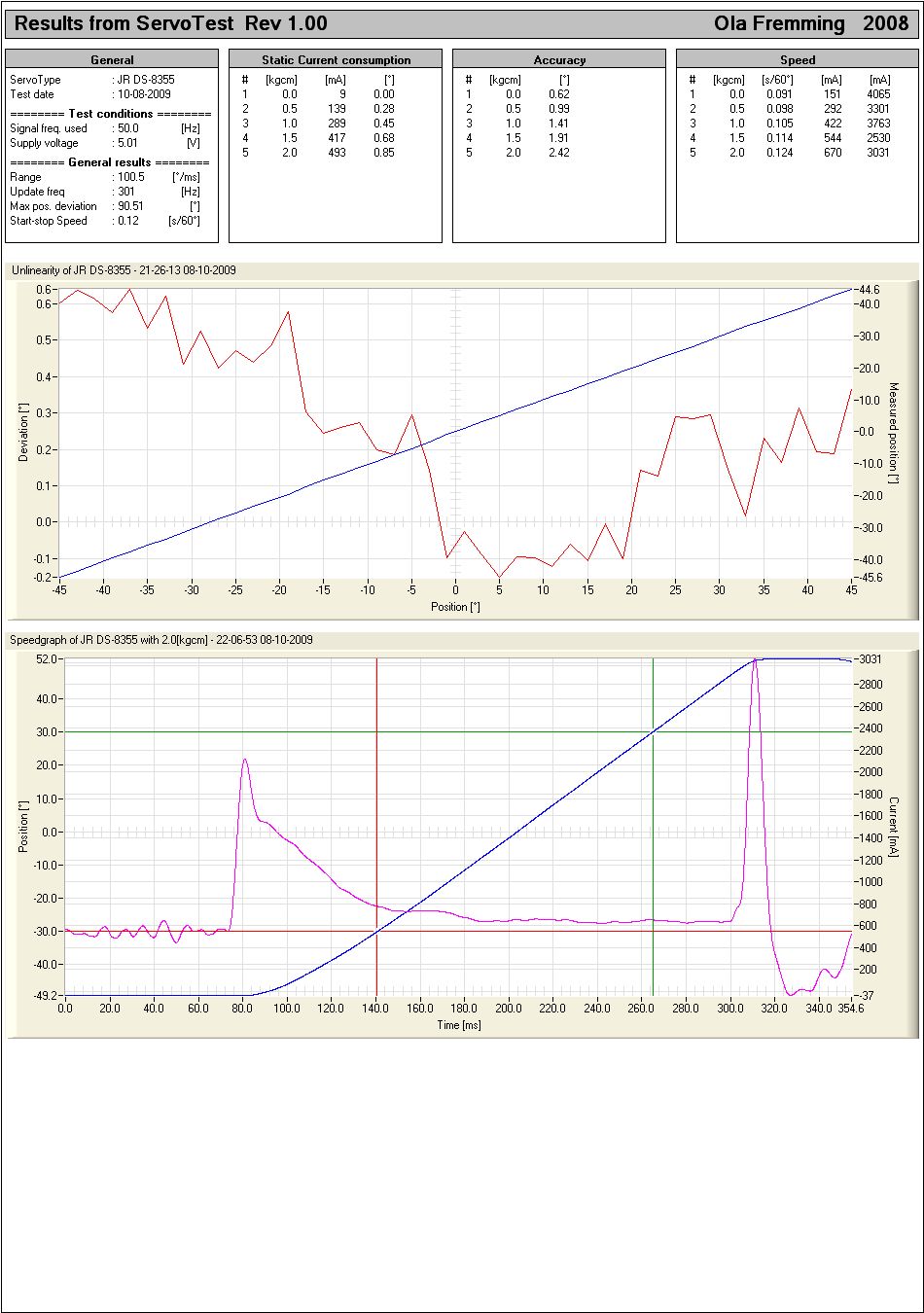
| JR
DS-8355 |
49 |
39x34.5x19 |
0.09 |
6.2 |
Plastic |
0.12 |
0.09 |
0.12 |
0.62 |
2.4 |
DS-8355 |
|
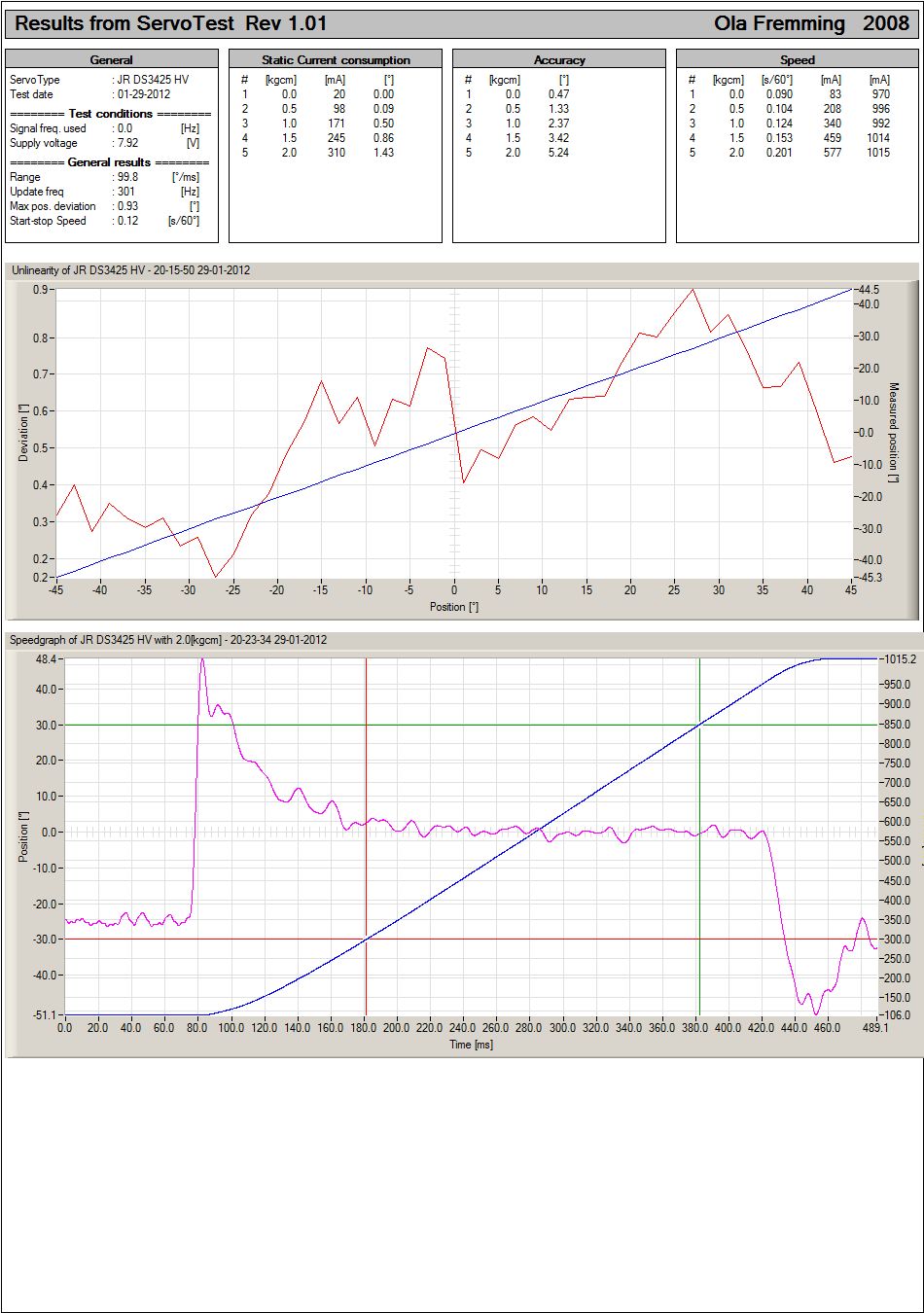
| JR
DS3425 HV |
30 |
38.5x26.5x15 |
0.11 |
4.3 |
Metal |
0.12 |
0.09 |
0.20 |
0.47 |
5.24 |
DS3425HV |
NB
: HV servo, tested with 2sLiPo |
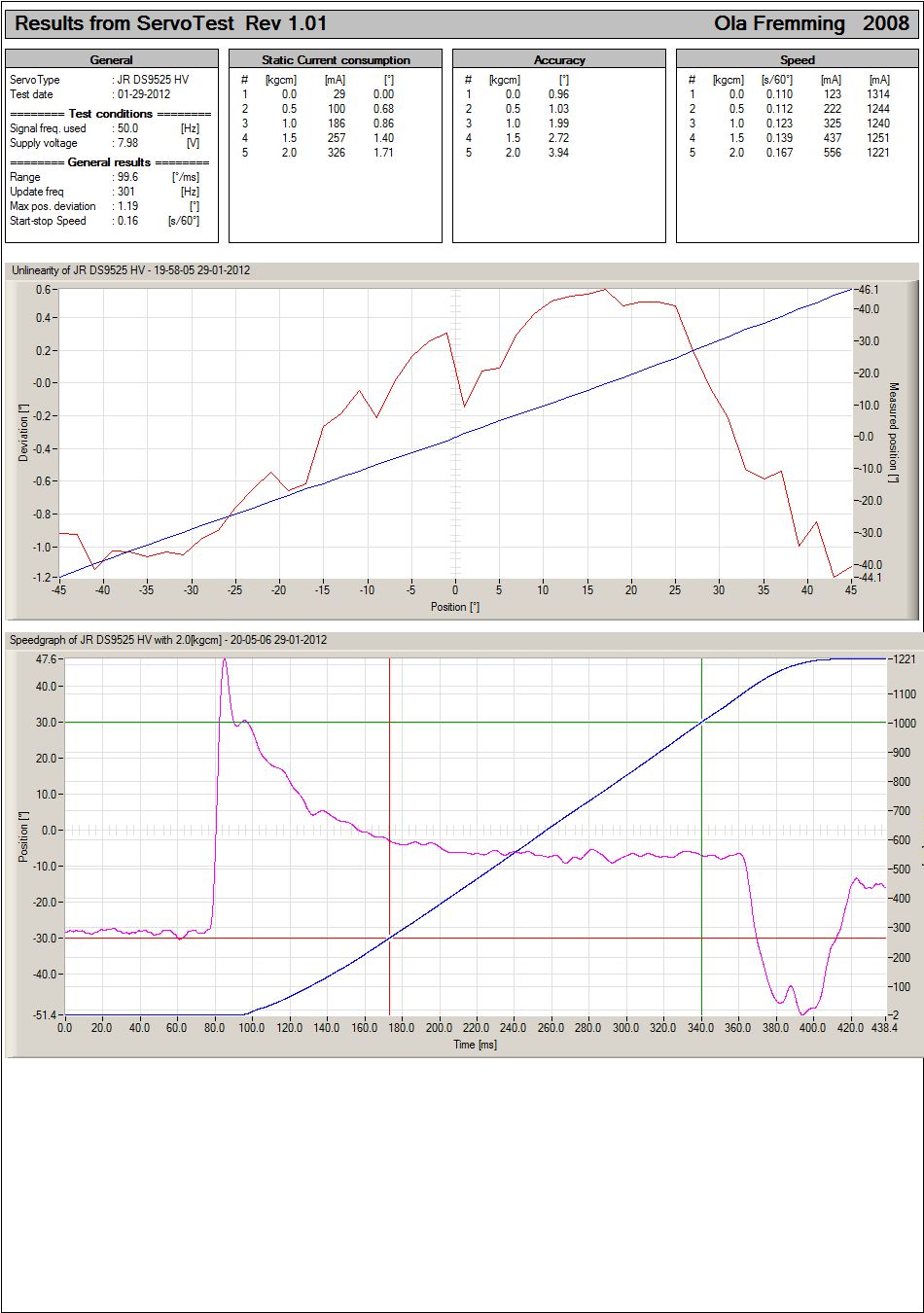
| JR
DS9525HV |
43 |
40.5x25.5x19 |
0.1 |
5.0 |
Metal |
0.16 |
0.11 |
0.167 |
0.96 |
3.94 |
DS9525HV |
NB
: HV servo, tested with 2sLiPo |
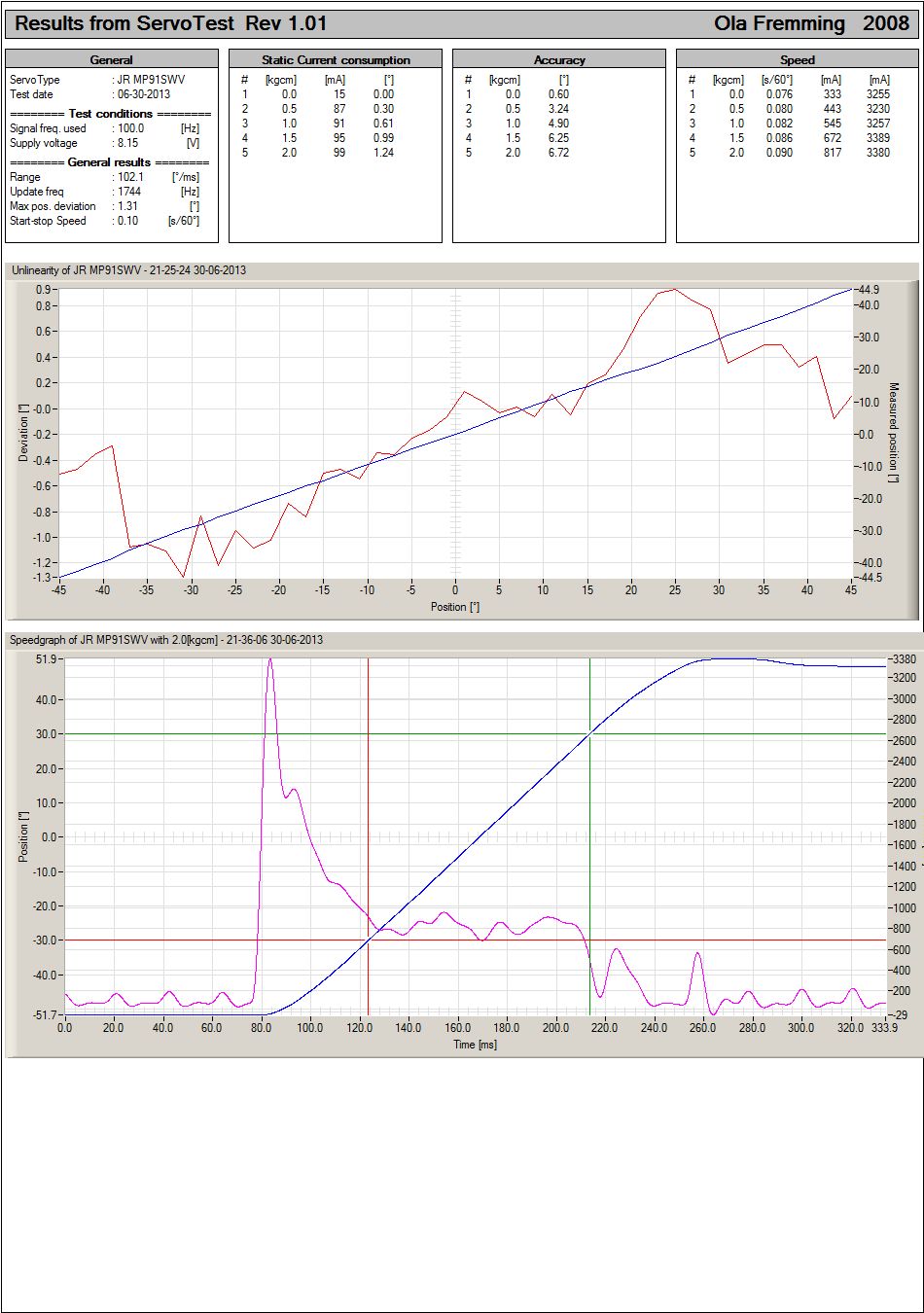
| JR
MP 91SWV |
46 |
40.5x25x21 |
0.09 |
12.2 |
Metal |
0.10 |
0.076 |
0.09 |
0.6 |
6.72 |
MP 91SWV |
NB
: HV servo, tested with 2sLiPo |
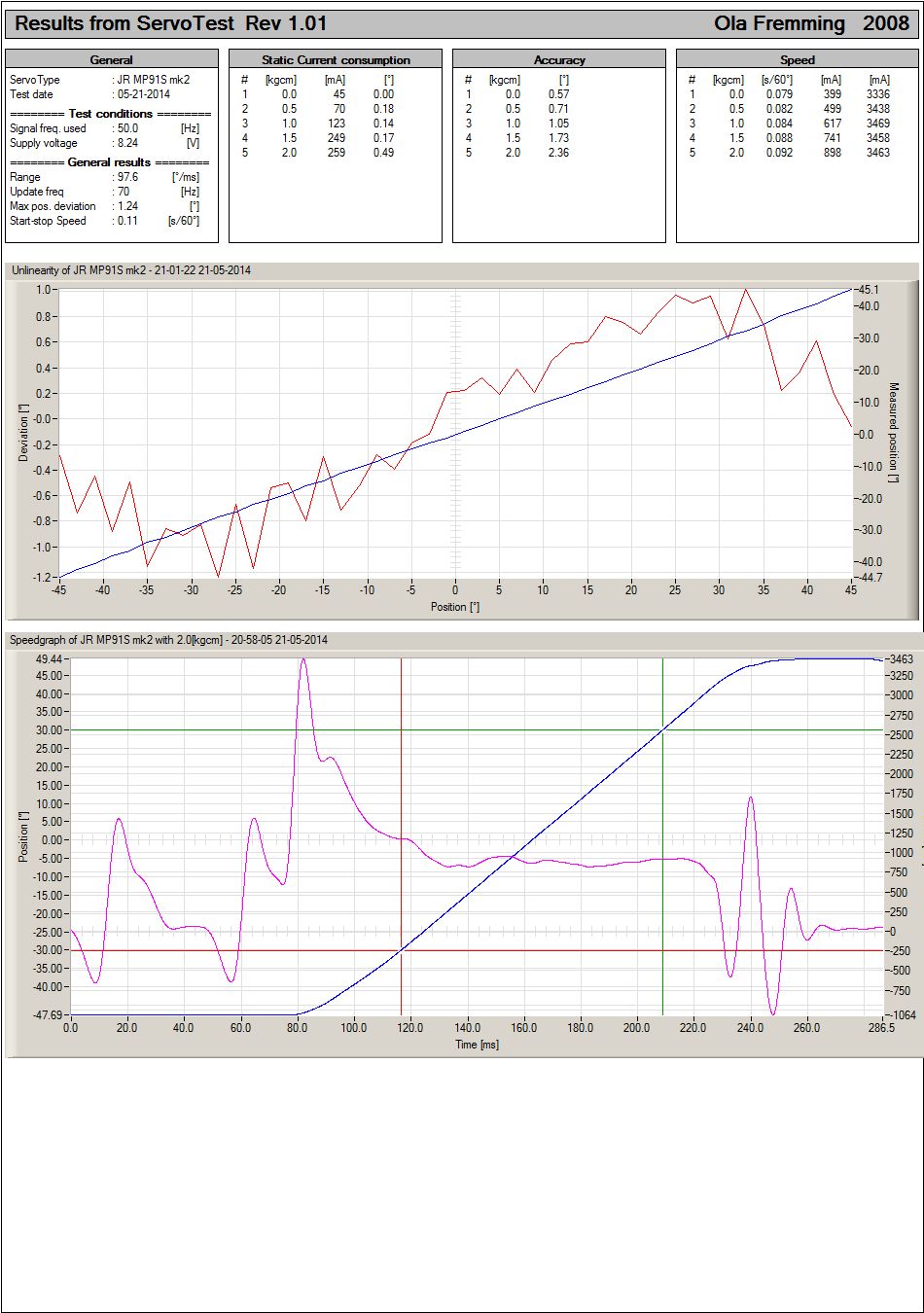
| JR
MP91S mk2 |
46 |
40.5x25x21 |
0.09 |
12.2 |
Metal |
0.11 |
0.079 |
0.092 |
0.057 |
2.36 |
MP
91S mk2 |
NB
: HV servo, tested with 2sLiPo |
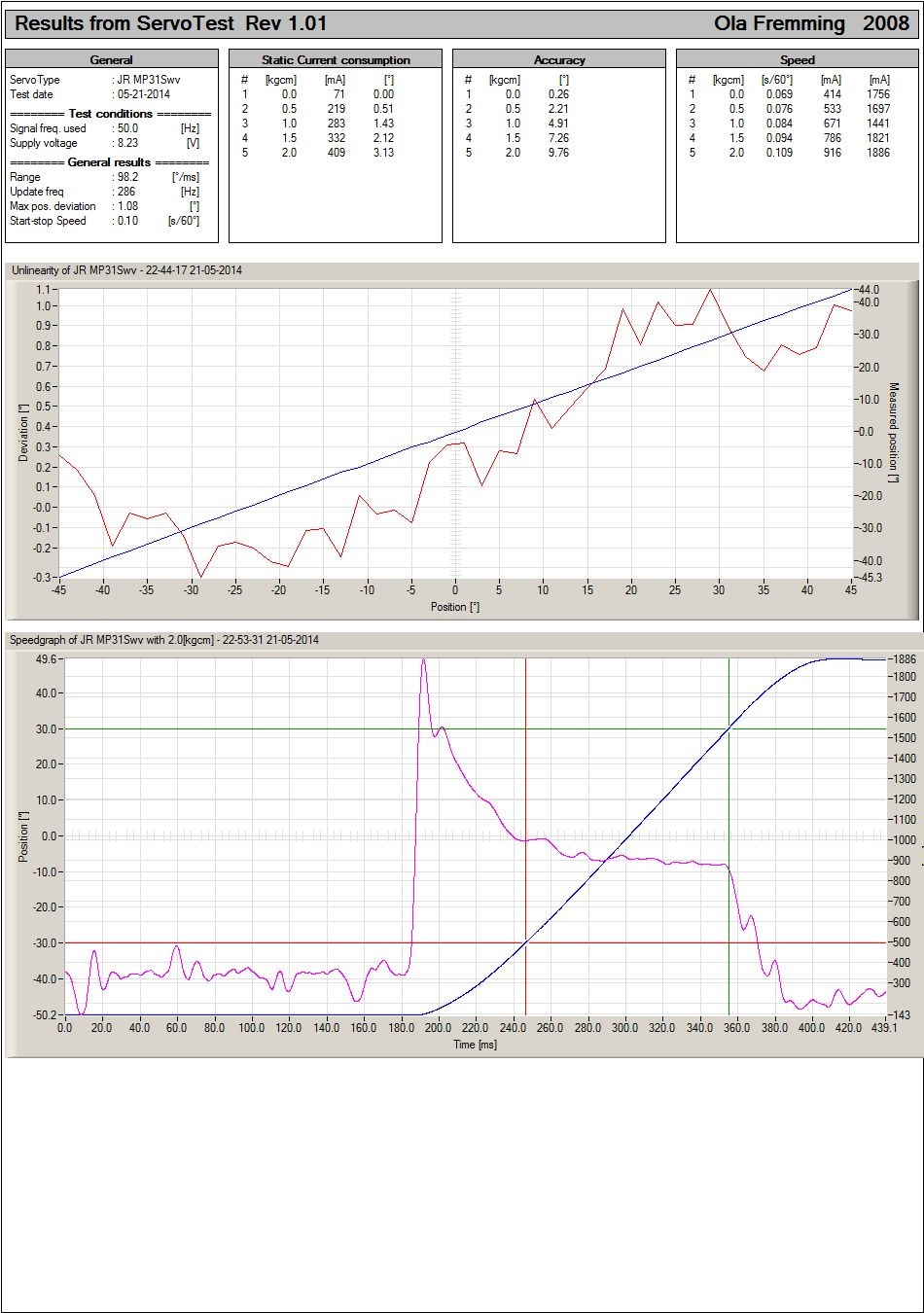
| JR
MP31SWV |
30 |
33x26.5x13 |
0.08 |
4.2 |
Metal |
0.1 |
0.069 |
0.109 |
0.26 |
9.76 |
MP31Swv |
NB
: HV servo, tested with 2sLiPo |
|
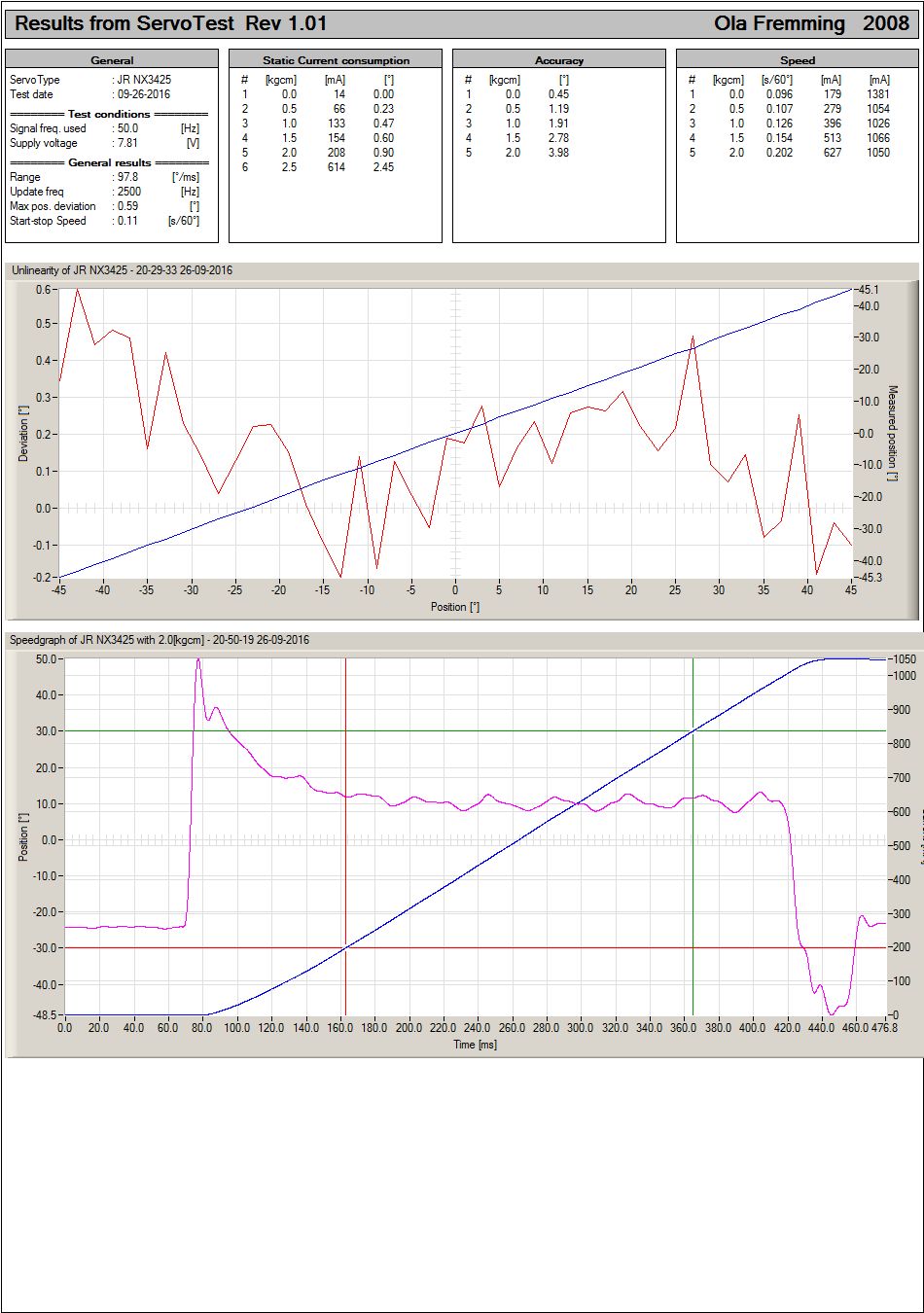
JR NX3425 |
30 |
33x26.5x15 |
0.1 |
4.3 |
Metal |
0.11 |
0.096 |
0.202 |
0.45 |
3.98 |
NX3425 |
NB
: HV servo, tested with 2sLiPo |
|
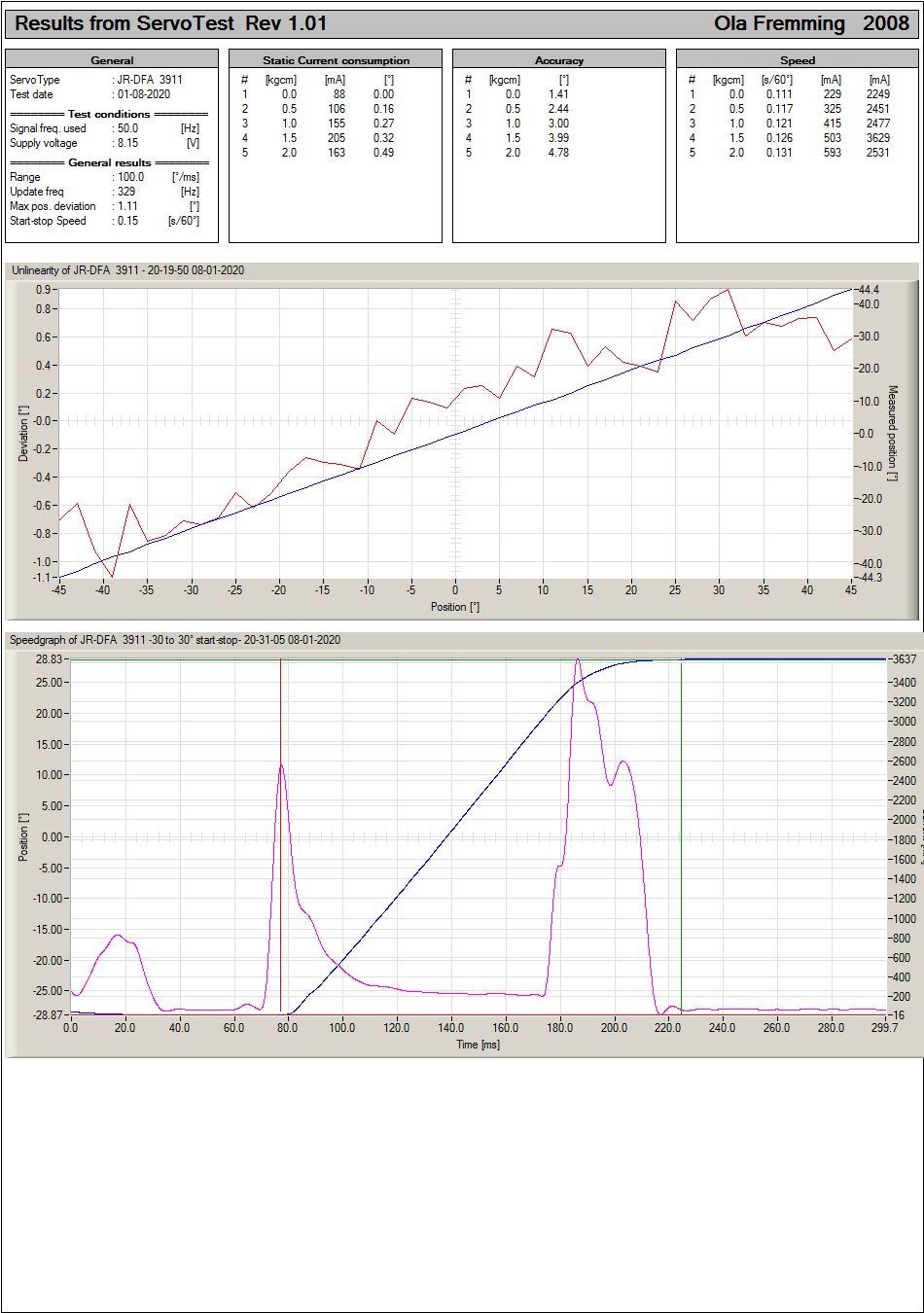
JR-DFA 3911 |
38 |
33x14.5 |
0.12 |
22.8 |
Metal |
0.15 |
0.111 |
0.131 |
1.41 |
4.78 |
DFA-3911 |
NB
: HV servo, tested with 2sLiPo Out of the box, not programmed |
|
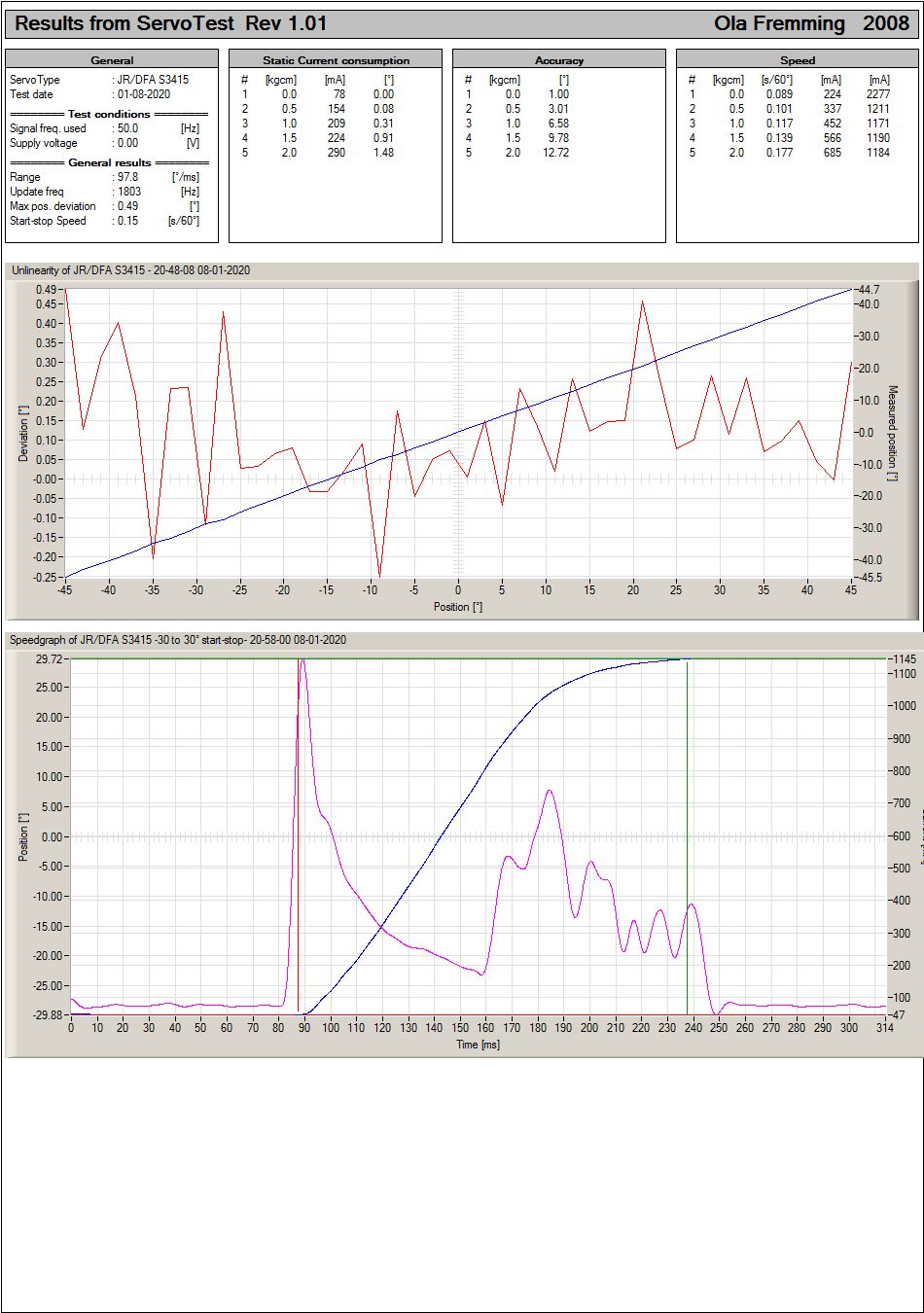
JR-DFA S3415 |
30 |
33x26.5x15 |
0.09 |
4.9 |
Metal |
0.15 |
0.089 |
0.177 |
1.00 |
12.72 |
DFA-3415 |
NB
: HV servo, tested with 2sLiPo Out of the box, not programmed |
|
=== JX === |
|
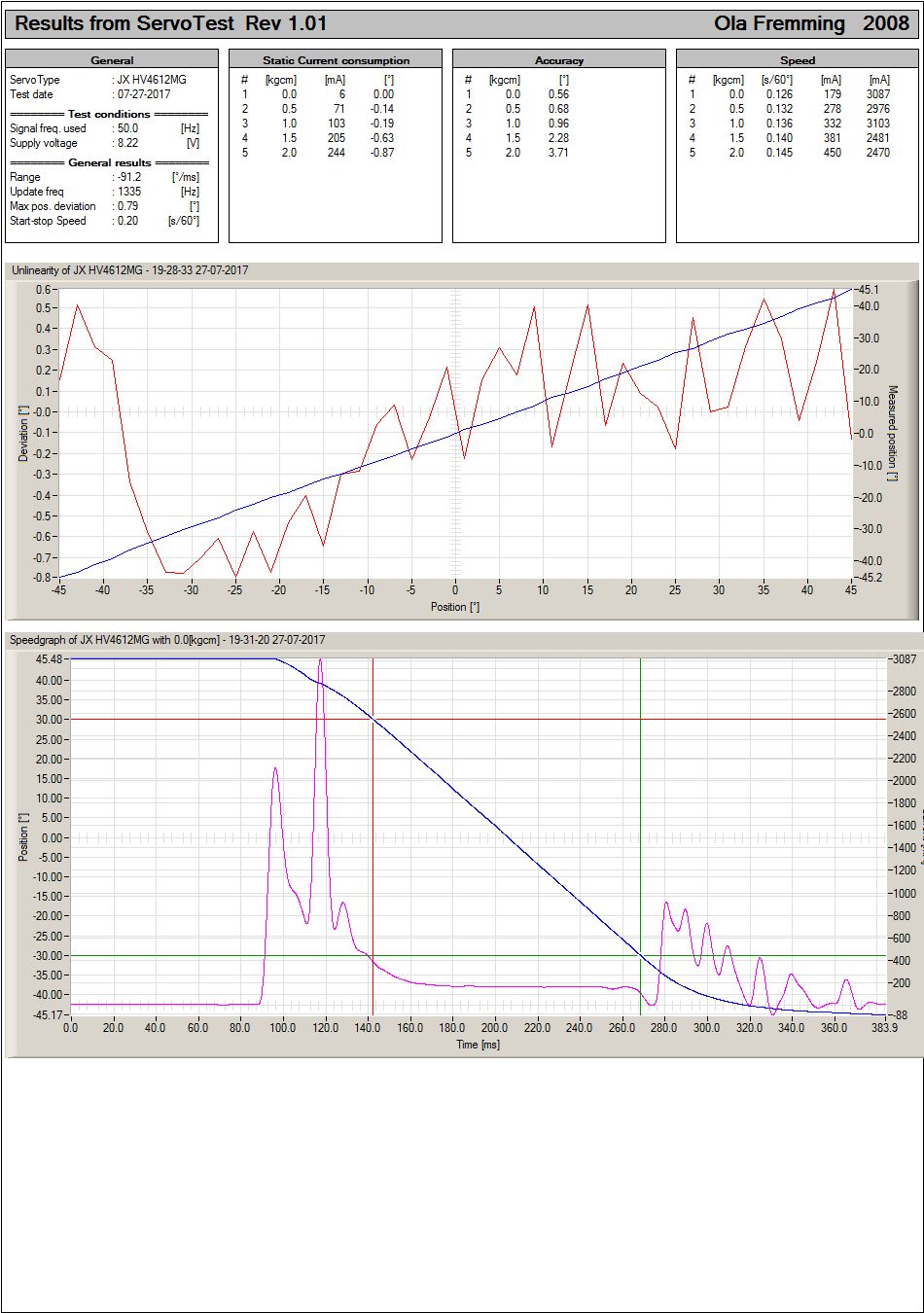
JX HV4612MG |
46 |
40.5x31x20.5 |
0.11 |
13.5 |
Metal |
0.2 |
0.126 |
0.145 |
0.56 |
3.71 |
HV4612MG |
NB
: HV servo, tested with 2sLiPo |
|
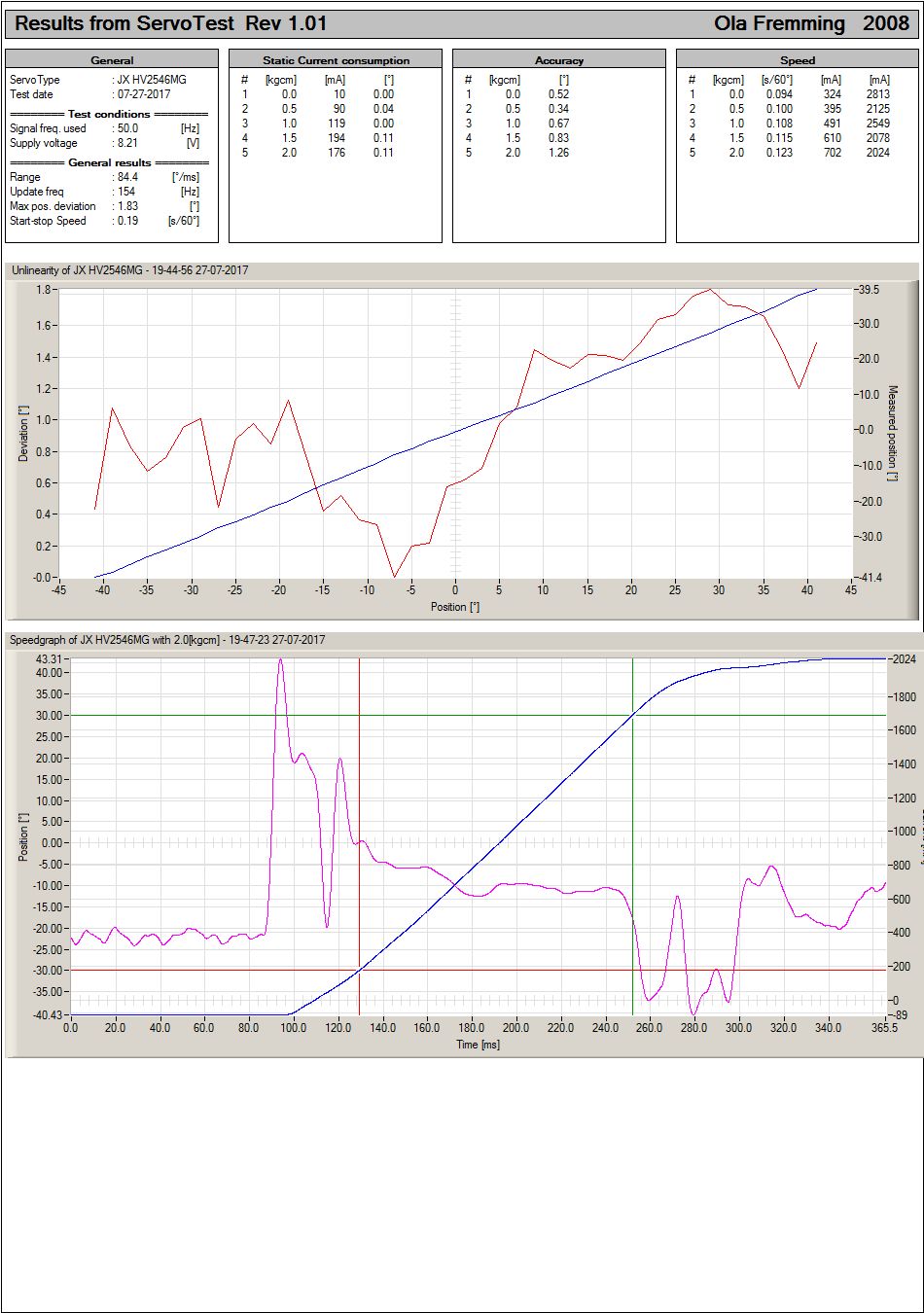
JX HV2546MG |
26 |
36x32x15 |
0.1 |
6.6 |
Metal |
0.19 |
0.094 |
0.123 |
0.52 |
1.26 |
HV2546MG |
NB
: HV servo, tested with 2sLiPo |
|
=== KST === |
|
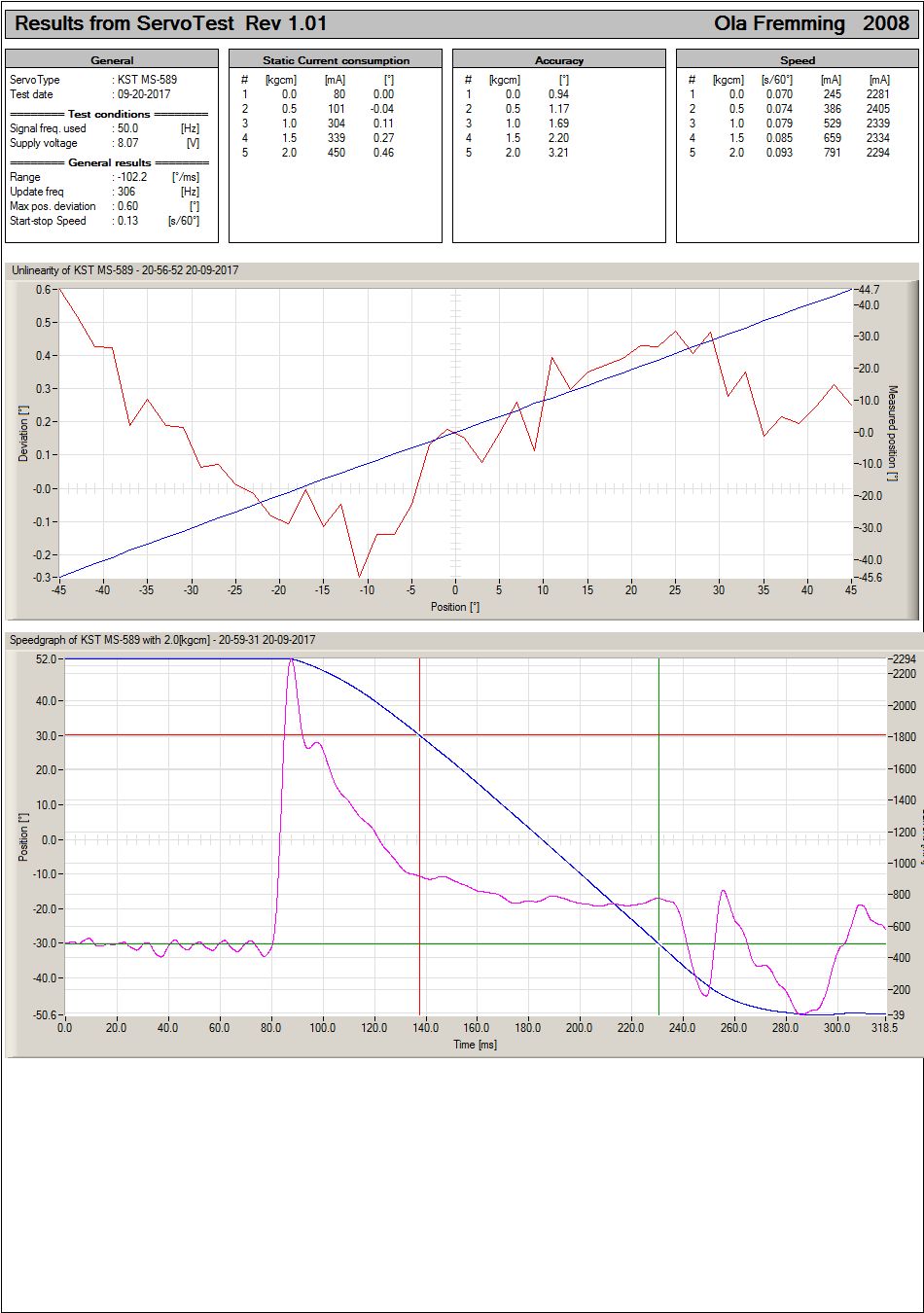
KST MS589 |
38 |
35.5x32.5x15 |
0.08 |
9.2 |
Steel |
0.13 |
0.07 |
0.09 |
0.94 |
3.21 |
MS589 |
NB
: HV servo, tested with 2sLiPo |
|
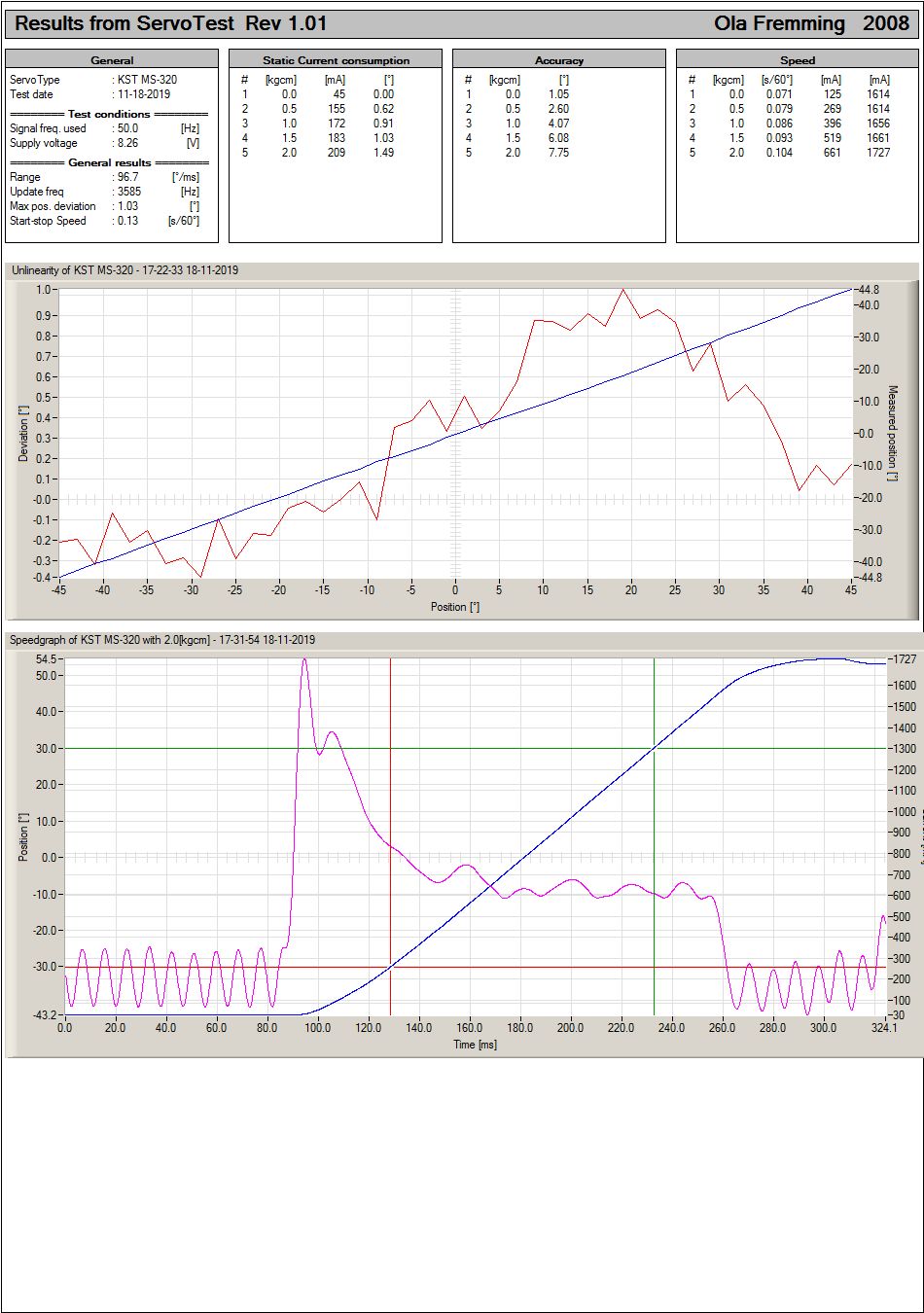
KST MS320 |
21 |
23x27x12 |
0.075 |
6.2 |
Steel |
0.13 |
0.07 |
0.104 |
1.05 |
7.75 |
MS320 |
NB
: HV servo, tested with 2sLiPo |
|
KST BLS915-2 |
72 |
40.5x20x37 |
0.069 |
21 |
Steel |
|
0.07 |
0.08 |
0.61 |
1.23 |
|
Tested at 8.0V |
|
KST X12 |
20 |
23x12x27.5 |
0.07 |
6.2 |
Metal |
|
0.074 |
0.113 |
2.6 |
5.2 |
|
|
|
KST X10 mini |
23 |
30x10x29.6 |
0.09 |
7.5 |
Metal |
0.124 |
0.092 |
0.136 |
1.46 |
3.55 |
|
|
|
=== KingMax === |
|
CLS2875H |
28 |
35x14x29 |
0.07 |
11 |
Metal |
|
0.083 |
0.11 |
1.0 |
6.3 |
|
|
|
CLS 2035H |
20 |
23x12x26,5 |
0.05 |
5.5 |
Metal |
|
0.054 |
0.086 |
1.42 |
5.4 |
|
|
NB : Servo torque is presented with the unit kg-cm,
to convert to oz-in multiply by 13.86 !
During development of the system and testing of the servo's I
had lying around I learnt a lot of interesting things, here are some :
By far most servo's are supplying power to the motor in pulses,
these pulses match the update frequency of servos. The amount of power supplied
during each pulse is controlled by the pulse-width as can be seen in the two
graphs below. The first one is on a JR DS-8401with a 2[kgcm] load, the second is
with more load on the same servo. As can be seen the max current in each pulse
is very similar, the pulse-width is different. By counting the pulses per a
certain time-frame the update frequency of the servo can be calculated, from the
graph below : 31 Pulses in 102 [ms] (31 / 0.102) indicates an update rate
of 303[Hz]. The more pulses you count the more accurate this result becomes.


The current consumption during start of movements (as during
speed testing) shows that the servo are doing it's very best to start immediately,
there is no need for precision involved, just start as fast as possible .
When the servo is to stop the picture is quite different, the the task is not
only to stop, but to stop at the correct place. Inside the servo there is a
regulating system (in the literature for control-systems, a so called
servo-system:-) )this performs the math (and control) needed to make the servo
stop in the wanted position. For each current-pulse it's calculating the
pulse-width needed to perform the requested positioning. The graphs below
shows how a JR DS-8401 start it's movement in 30-40 [ms] with long pulses, and
stops in 40-50[ms] with pulses that are of different length.


When making the test-rig I have made an effort to supply the
servos with as stable voltage as I could. To verify this the graph below
shows the current consumed and the voltage deviation from 5.0[V] during start of
movement. The voltage drop is just above 20[mV] (that's 0.02V) during a
1.7[A] current pulse, which is far better than to be expected in a real life
situation in our models. Our batteries and cable resistance makes it far
worse leading to slower and weaker servos than what my test results indicate
(unless if you run a higher voltage initially, of course).

|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}