![]() Ola
Fremming's homepage
Ola
Fremming's homepage
|
|
|
|
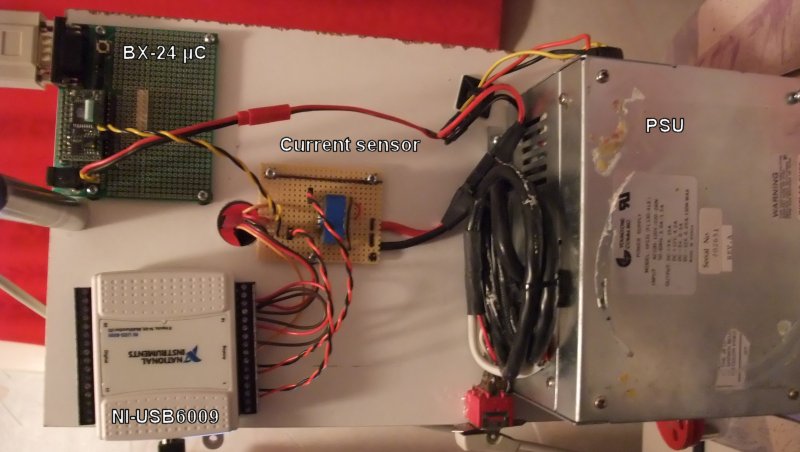
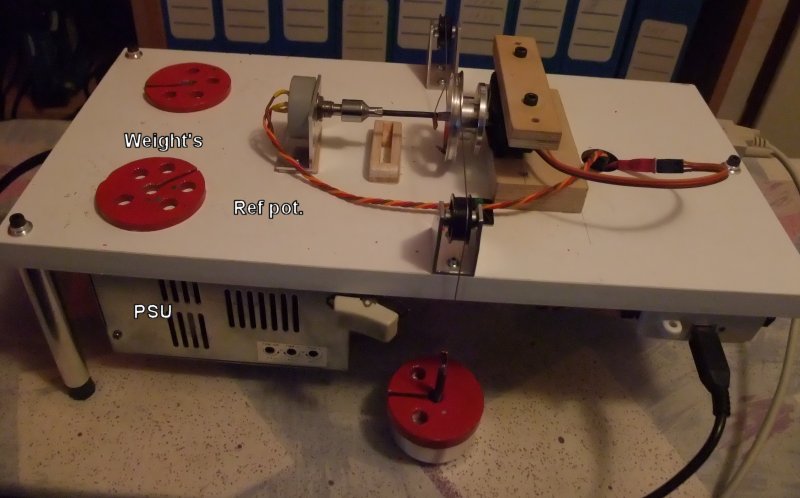
Servo testing As part of the continuous task of keeping up and perhaps improving my level of competitiveness in F3A I have started to look seriously into the servos. I find it very hard to do meaningful comparisons of the spec's that the manufacturers supply us with. Not that I have problems to read the numbers, but more if these figures are worth comparing at all. As I am an engineer working with testing of sensor-devices, I know that it is more or less meaningless to compare figures if the test-methods are not the same. And I am 100% sure that the manufacturers selects test-methods that yields the best possible numbers for their own products. Many years ago I used my EagleTree logger with a servo-current sensor attached to one servo at a time, to try to determine what kind of loads the servos do see during a typical F3A flight schedule. The next step was to perform measurements on the servo's to understand what load the servos are exposed to during a flight. I suspect that stories of blow-back of rudder servos during KE maneuvers and similar is exaggerated at the best. To be able to test servos with a comparable result, I have then created the rig as described below. The test-rig contains some major components :
So, what can be measure by using this rig ? To take it one by one I have typically been doing these tests :
A typical test-result presentation contains these elements :
The general description contains references to the tested device, test-conditions, and also some general results.
Current consumption when servo is stationary is presented like this, one column with the applied torque, one with the average consumption and one that shows the angle deviation generated by the applied torque.
Accuracy when moving towards center, one column with the applied torque and one with the deviation angle between the two end-positions.
During speed measurements a lot of data is acquired, first column contains the applied torque, the next the measured speed, then the average current consumption when moving from-30 to +30°, and finally the peak current.
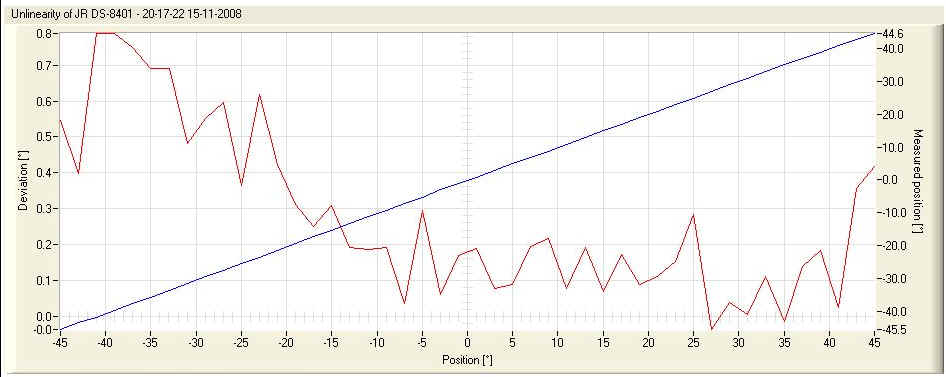
The position deviation (linearity) is also presented as a graph as shown below. The blue line shows the target positions, while the red one shows the servo's deviation from the target.
Also the last speed measurement is presented, blue line shows the servo position and the magenta the current consumption. It is worth-while to make a note that the peak-current used to start the movement is far higher than the average current, and the peak value is close to independent of the servo-load. The Current as presented below is slightly filtered to get a smooth curve, unfiltered the system is capable of measuring each current pulse that the servo's are sinking. The last picture below show the same type of result as this one, but with unfiltered current.
|